PIC Stepper Motor Controller using PIC16F84A with Proteus Simulation
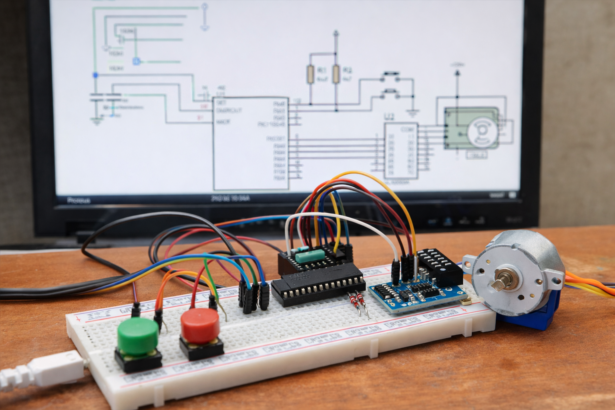
Introduction Stepper motors are widely used in embedded systems and DIY electronics projects where precise position control is required. This PIC Stepper Motor Controller microcontroller project uses a PIC microcontroller to control the direction of a stepper motor through simple push-button inputs. The project demonstrates how a PIC16F84A microcontroller can generate the required stepping sequence […]
PIC Stepper Motor Controller using PIC16F84A with Proteus Simulation Read More »