Summary of Exploring Versatility: GSM-Based Robotic Vehicle Technology
Introduction to Robotics — concise summary (under 100 words): Robotics evolved from humanoid concepts to diverse industrial and mobile machines. Key components include mechanical platforms, sensors, microcontrollers, motors, power supplies, and electronic control. Robots differ by mobility and autonomy, serving roles in safety, repetitive tasks, and precision manufacturing. Motors (DC, AC, stepper, servo), drivetrains (gears, belts, gearboxes), batteries, MOSFETs/relays, and various sensors (proprioceptive, proximity, IR, bump) enable function. DTMF decoders like the MT8870D use band-split filters and digital counting to detect and validate tone pairs for signaling.
Parts used in the Introduction To Robotics Project:
- Mechanical platform (wheeled platform, arm, gantry, or other structure)
- Sensors (proximity, infrared, bump, feeler, proprioceptive)
- Transducers
- Microcontroller (MCU)
- Motors (DC motor, AC motor, stepper motor, servomotor)
- Gears and chains
- Pulleys and belts
- Gearbox
- Power supplies (primary and secondary batteries, two battery packs with common ground)
- Bridge relay
- MOSFETs
- Transistors (BJT and FET)
- R/C servos
- MT8870D/MT8870D-1 DTMF receiver
Introduction To Robotics
The term ‘Robot’ remains elusive, defying a precise definition due to its evolving usage. Initially, it referred to humanoid or human-like beings and originated from the Czech word meaning ‘slave labor,’ coined by Karel Čapek in his 1921 play, “Rossum’s Universal Robots.” These early robots were biochemical entities, akin to what we now label as androids. Films such as Fritz Lang’s “Metropolis” in 1922 and science fiction literature like Asimov’s ‘I Robot’ contributed to shaping the public and scientific imagination during this period.
In industry and academia, the concept of robots shifted away from humanoid forms. In the 1970s, the most advanced robot was the Stanford Cart, resembling a rectangular box on wheels from an old-fashioned baby carriage. The focus was on emulating human reasoning rather than human appearances, although these early robots moved slowly due to the complexity of human-like perception-inference-reasoning models.
The 1980s marked a transition to robot controllers modeled after insects and animals, enabling fast reactive responses seen in modern toy sensing robots and robot pets. In industrial applications, such as painting cars, the emphasis shifted to robot arms rather than entire humanoid robots. Initially regarded as part of a robot’s body, these robot arms eventually gained recognition as independent robots. The key distinction now lies between non-mobile robots (arms and actuators) and mobile robots, which may have wheels, legs, or even move through water or air.
Another significant distinction is between autonomous and non-autonomous robots. Originally, a robot was considered such only if autonomous, operating without human intervention. However, the term ‘mobile robot’ is now acceptable for any autonomous vehicle, regardless of its appearance, be it a car, plane, or horse. Additionally, the use of the term ‘robot’ is increasingly accepted for remote-controlled vehicles. This evolution began with tele-robotics, involving robots operated at a distance, as seen in emergency services for bomb disposal and firefighting. Subsequently, remote-controlled robots gained popularity in television contests like Robot Wars, TechnoGames, and Mechanoids.
The 3 Laws of Robotics
Literature, films, narratives, and various fictional works serve as vehicles for exploring novel perspectives on the real world. Science fiction, in particular, has frequently drawn inspiration from the potential future scenarios of robotics. However, the interplay between science fiction and robotics is not unidirectional; science fiction also exerts an influence on the field of robotics.
In the early stages of robotic development, renowned author Isaac Asimov expressed concerns about humanity’s readiness for what he perceived as an inevitable future: the integration of robots into society. In 1942, Asimov formulated a three-point ethical code for the robots depicted in his extensive body of work, known as Asimov’s Laws of Robotics:
1. A robot is prohibited from causing harm to a human being or, through inaction, allowing harm to befall a human.
2. A robot must adhere to the orders issued by human beings, except in cases where such directives conflict with the first law.
3. A robot must safeguard its own existence, prioritizing self-preservation as long as it does not contradict the first or second law.
Basic Parts of a Robot Vehicle:
Essentially, a robot comprises fundamental yet crucial components, including:
– A mechanical apparatus, such as a wheeled platform, arm, or other structure, capable of interacting with its surroundings.
– Sensors positioned on or around the device that can perceive the environment and provide valuable feedback to the device.
– Systems designed to process sensory input within the device’s current context, guiding the device to execute actions in response to the situation.
In manufacturing, robot development has primarily concentrated on engineering robotic arms for various manufacturing processes. In the space industry, robotics is geared toward specialized planetary rovers, each unique in its design. Unlike a highly automated manufacturing plant, a planetary rover operating on the dark side of the moon, devoid of radio communication, might encounter unforeseen situations. A planetary rover must, at the very least, possess a source of sensory input, a method of interpreting that input, and a means of adjusting its actions to navigate a dynamic environment.
Moreover, the necessity to sense and adapt to a partially unknown environment underscores the requirement for intelligence, commonly referred to as artificial intelligence (AI). Whether in military technology, space exploration, healthcare, or commerce, the benefits of employing robots have been acknowledged to the extent that they are becoming integral to our collective experiences and everyday lives.
Their primary function often revolves around alleviating us from potential dangers and mundane tasks:
Safety Robotics has been advanced to manage nuclear and radioactive substances for various applications, encompassing nuclear weaponry, power generation facilities, environmental remediation, and the manufacturing of specific pharmaceuticals.
Unpleasantness Robots undertake numerous duties that are monotonous and undesirable yet essential, such as welding or janitorial tasks.
Repetition and Precision The robotics industry has heavily relied on assembly line work, particularly in manufacturing. Robots play a significant role in both manufacturing processes and, in a more glamorous context, space exploration, where the emphasis is on minimizing maintenance requirements.
Mechanical Platforms – The Hardware Base
A robot is composed of two primary components: the robot body and some form of artificial intelligence (AI) system. Various body parts can be classified as a robot, with articulated arms employed in tasks like welding and painting, gantry and conveyor systems facilitating part movement in factories, and colossal robotic machines handling earth excavation in mines. The intriguing facet of robots, in general, lies in their behavior, which necessitates a form of intelligence.
The most basic behavior exhibited by a robot is locomotion. Typically, wheels serve as the fundamental mechanism enabling a robot to move from one point to another. Naturally, there is a need for some propelling force to command the rotation of the wheels.
Motors
Robots are empowered by an array of electric motors, enabling them to execute programmed movements for the transportation of materials, parts, tools, or specialized devices. The efficiency rating of a motor delineates the proportion of consumed electricity converted into mechanical energy. Modern robotics technology employs several mechanical devices, including:
DC Motor Permanent magnet, direct-current (PMDC) motors necessitate only two leads and employ a configuration of fixed and electro-magnets (stator and rotor) along with switches. Together, they constitute a commutator to generate motion through a rotating magnetic field.
AC Motor AC motors undergo power cycling at the input leads to maintain continuous field movement. When prompted by a signal, both AC and DC motors execute their actions to the best of their capabilities.
Stepper Motor Stepper motors share similarities with brushless DC or AC motors. They operate by energizing different magnets in the motor in sequence, causing the rotor to move in discrete steps. Steppers are specifically engineered for precise control, allowing them not only to rotate as directed but also to rotate at varying rates in terms of steps-per-second, up to their maximum speed.
Servomotors Servomotors operate in a closed-loop system, where they dynamically adjust themselves to align with the provided signal. Commonly employed in radio control airplanes and cars, servos are essentially straightforward DC motors equipped with gearing and a feedback control system.
Driving Mechanisms
Gears and Chains Gears and chains serve as mechanical mechanisms that offer a robust means to transfer rotary motion from one location to another, with the possibility of modifying its characteristics in the process. The alteration in speed between two gears is contingent on the number of teeth present on each gear. As a powered gear completes a full rotation, it engages the chain and imparts motion equal to the number of teeth on that particular gear.
Pulleys and Belts Pulleys and belts, two additional categories of mechanical systems employed in robots, operate similarly to gears and chains. Pulleys consist of wheels featuring a groove along the edge, while belts are elastic loops designed to fit within that groove.
Power Supplies
Power supplies are typically provided by two types of batteries. Primary batteries are utilized once and then discarded, whereas secondary batteries engage in a (mostly) reversible chemical reaction, allowing them to be recharged multiple times. Primary batteries exhibit higher density and a lower self-discharge rate. On the other hand, secondary (rechargeable) batteries possess less energy than primary batteries but can undergo recharging numerous times, depending on their chemistry and environmental factors. The available batteries for use in robots come in a wide variety of types and styles. These batteries are classified based on their chemistry and size, and their voltage and capacity are rated accordingly. The voltage of a battery is determined by the cell’s chemistry, while both chemistry and size contribute to its capacity.
In the case of the robot platform, it operates on two distinct battery packs that only share a ground. This configuration ensures that the motor may affect one power source while the electronics continue to function using the other. Furthermore, the electronics and motors can operate at different voltages.
Electronic Control
A robot consists of two main hardware platforms: the mechanical platform, which deals with unregulated voltages, power, and back-EMF spikes, and the electronic platform, which handles clean power and 5-volt signals. To enable digital logic control over mechanical systems, these two platforms need to be connected, typically achieved through a bridge relay. This relay is activated by a control signal that creates a magnetic field in its coil, closing a physical switch. Alternatively, MOSFETs, efficient silicon switches available in various sizes, can function as solid-state relays for controlling mechanical systems.
In larger robots, PMDC motors may be required, but using MOSFETs with high “on” resistance (Rds(on)) values can lead to increased heat dissipation, significantly raising the chip’s temperature. Understanding junction temperatures within the MOSFET, as well as coefficients of conduction for the MOSFET package and heat sink, becomes crucial when dealing with PMDC motors. Transistors, which fall into two main families—bipolar junction transistors (BJT) and field-effect transistors (FET)—operate differently. In BJT devices, a small current at the base controls a larger current between the emitter and collector, while FET devices use an electrical field at the gate to regulate the flow between the source and drain.
Sensors
Robots respond based on a fundamental temporal assessment, necessitating diverse types of sensors. In most systems, a temporal sense is ingrained through circuits and programming. To be effective in practical applications, a robot requires perceptual hardware and software that can be rapidly updated. Irrespective of sensor hardware or software, the process of sensing and sensors involves interaction with external events, i.e., the outside world. The sensor gauges a certain attribute of the world, and the term “transducer” is often used interchangeably with “sensor.” A transducer is the component of the sensor that converts the energy associated with the measured attribute into a different form of energy. The sensor receives this energy and transmits a signal to a display or computer. Sensors employ transducers to convert the input signal (such as sound, light, pressure, temperature, etc.) into an analog or digital format that can be utilized by a robot.
Logical Sensors A compelling conceptualization of a sensor is a logical sensor, constituting a sensing unit or module that provides a specific perception. It encompasses both the signal processing derived from the physical sensor and the software processing required to extract the percept.
Microcontroller Systems
Microcontrollers (MCUs) serve as intelligent electronic components embedded in robots, carrying out functions akin to those executed by a microprocessor (CPU) in a personal computer. While MCUs exhibit slower speeds and accommodate less memory than CPUs, they are specifically designed for addressing real-world control challenges. A notable distinction between CPUs and MCUs lies in the external components required for operation, with MCUs often capable of functioning with minimal external parts, typically necessitating only an external crystal or oscillator. The fundamental characteristics of a microcontroller encompass speed, size, memory, and additional features.
Speed, measured in clock cycles and commonly expressed in megahertz (MHz), varies across different MCUs, influencing the effective processing speed. Size denotes the number of bits of information processed in a single step, with MCUs available in 4-, 8-, 16-, and 32-bit configurations, with 8-bit MCUs being the most prevalent. Microcontrollers quantify their ROM in thousands of bytes (KB) and RAM in individual bytes. Many MCUs adopt the Harvard architecture, segregating the program memory from data memory, enhancing access efficiency.
The fourth aspect, labeled as “other,” encompasses features like dedicated input devices often equipped with small LED or LCD displays for output. Microcontrollers receive input from the device, directing signals to various components within the device. Additionally, a program counter keeps track of the command to be executed by the microcontroller.
R/C Servos Servomotors find utility in various smaller robots, thanks to their compact size and affordability, features that initially make them popular in radio-controlled models such as cars and planes. These servomotors are equipped with a built-in motor, gearbox, position feedback mechanisms, and controlling electronics. In particular, standard radio control servomotors, commonly employed in model airplanes, cars, and boats, prove advantageous for creating limbs and other mechanical appendages that exhibit linear motion rather than circular rotation.
Wide World Of Robots
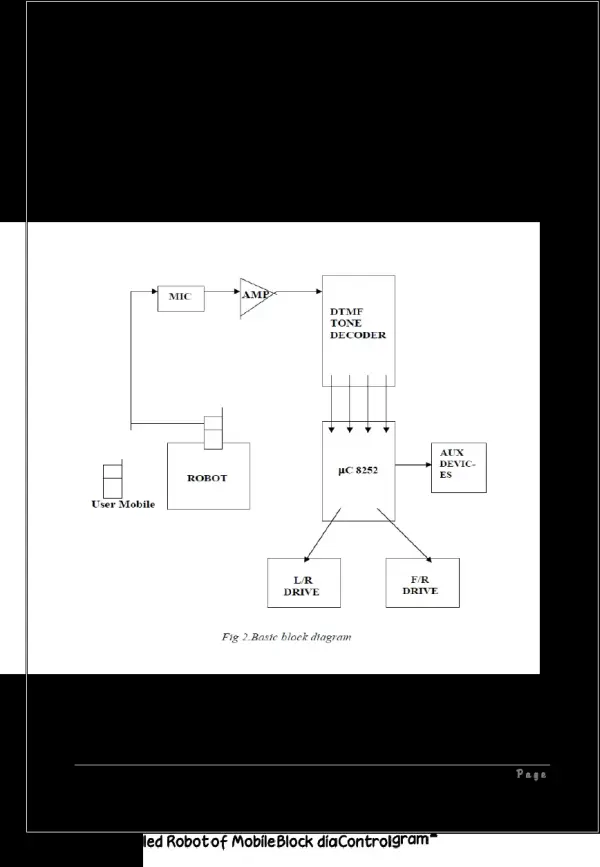
Functional Block Diagram:
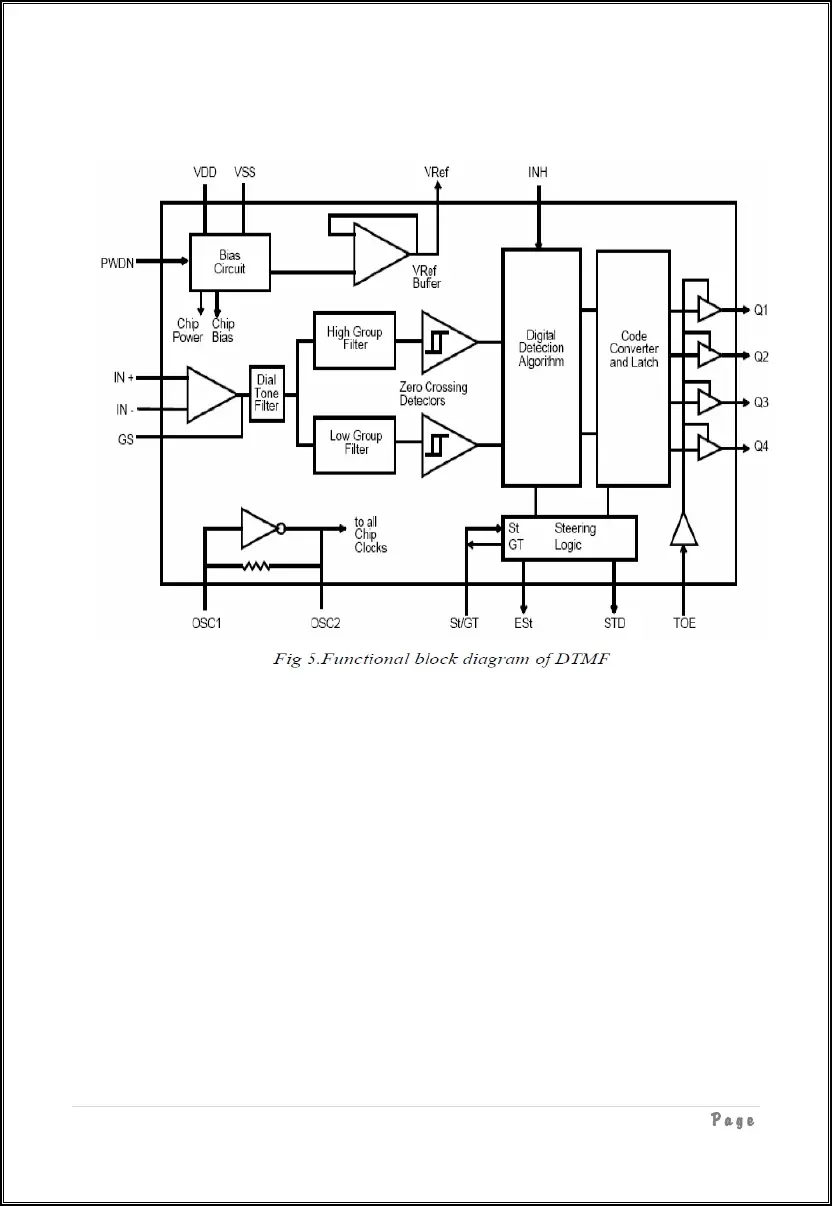
Functional Description:
Filter Section
To achieve the segregation of low-group and high-group tones, the DTMF signal is directed to the inputs of two sixth-order switched capacitor bandpass filters. These filters are designed with bandwidths corresponding to the low and high group frequencies. The filter section is enhanced with notches at 350 and 440 Hz, effectively rejecting dial tones. Following each filter output is a single-order switched capacitor filter section that smoothens the signals before undergoing limiting.
Limiting is carried out by high-gain comparators, equipped with hysteresis to prevent the detection of undesired low-level signals. The outputs of these comparators yield full rail logic swings at the frequencies of the incoming DTMF signals.
Decoder Section
After the filter section, a decoder is implemented, utilizing digital counting techniques to identify the frequencies of incoming tones and validate their alignment with standard Dual-Tone Multi-Frequency (DTMF) frequencies. A sophisticated averaging algorithm serves to safeguard against tone simulation by external signals, such as voice, while offering resilience to minor frequency deviations and variations. This algorithm has been meticulously designed to achieve an optimal balance between resistance to talk-off, tolerance to interfering frequencies (third tones), and noise.
Upon the detector’s recognition of two valid tones, often termed as the “signal condition” in certain industry specifications, the “Early Steering” (ESt) output transitions to an active state. Any subsequent loss of the signal condition prompts ESt to revert to an inactive state (refer to the “Steering Circuit”).
- What are the basic parts of a robot vehicle?
The article lists a mechanical apparatus, sensors, and systems to process sensory input that guide actions. - How do robots differ by mobility and autonomy?
Robots are distinguished as non-mobile (arms/actuators) versus mobile (wheels, legs, water, air) and as autonomous or non-autonomous, including remote-controlled tele-robotics. - What types of motors are used in robots?
The article describes DC motors (PMDC), AC motors, stepper motors, and servomotors. - How are mechanical motions transmitted in robots?
Motion is transmitted using gears and chains, pulleys and belts, and gearboxes. - What power supply arrangements are described for robot platforms?
The platform can use two battery packs sharing only a ground so motors use one pack while electronics use the other, and batteries may be primary or secondary. - How is electronic control achieved between mechanical and electronic platforms?
The two platforms are connected via a bridge relay or MOSFETs acting as solid-state relays, enabling digital logic control of mechanical systems. - What sensor types are explained in the article?
The article explains logical sensors, proprioceptive sensors, proximity sensors, infrared sensors, and bump and feeler sensors. - What role do microcontrollers play in robots?
Microcontrollers provide real-world control functions with characteristics like speed, size (bit width), memory, and dedicated I/O for sensor input and actuator output. - What is the function of the MT8870D DTMF receiver described?
The MT8870D segregates low and high group tones with sixth-order filters, limits signals with comparators, and uses digital counting and averaging to validate and decode DTMF tone pairs. - How do servomotors differ from other motors in robotic use?
Servomotors are closed-loop devices with gearing and feedback for precise positional control, commonly used in R/C models and small robot limbs.