Infrared Remote Controlled (RC) Steerable Vibrobot Created by Naghi Sotoudeh
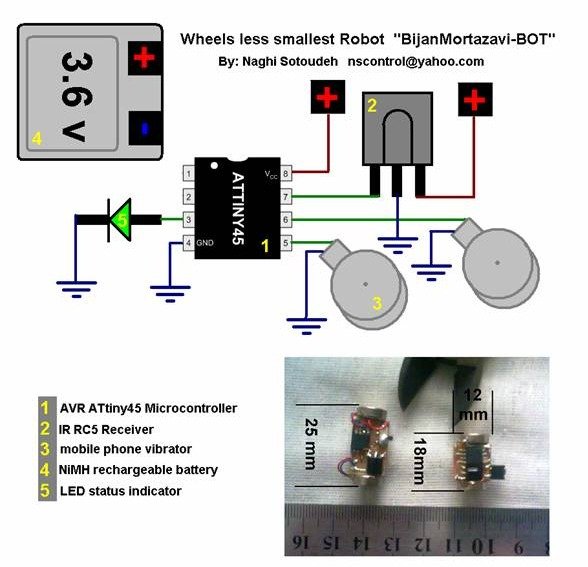
Vibrobots (and bristlebots) are simple robots that use a tiny pager / cellphone vibrator motor (with an eccentric weight) to randomly bounce around — they are the subject of many Maker / DIY projects as well as some well-known commercial toys (such as the $7.00 Hexbug Nano). Naghi Sotoudeh, a Hizook reader from Iran, contacted […]
Infrared Remote Controlled (RC) Steerable Vibrobot Created by Naghi Sotoudeh Read More »