Simple JDM PIC Programmer using PIC16f84A microcontroller
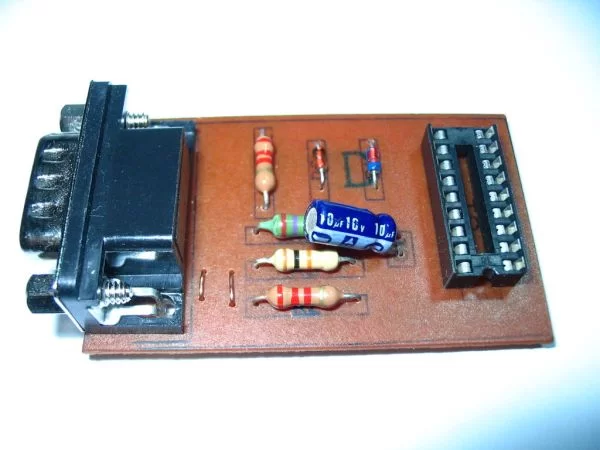
Simple JDM PIC Programmer I have built this project to burn my small PIC’s This is a serial programmer works on the RS232 ( PC serial port ), known as JDM Programmer, thanks to the site http://pic16f84.hit.bg/ which contains the schematic and the programmer software. The programmer is powered from the Serial port itself, so […]
Simple JDM PIC Programmer using PIC16f84A microcontroller Read More »