
Summary of Object Detecting Android Mobile Phone Controlled Bluetooth Robot Using PIC Microcontroller 16F877A
This article details an Android and Bluetooth-controlled robot using a PIC16F877A microcontroller. It features obstacle avoidance via an ultrasonic sensor, which triggers beeps and displays distance on an LCD screen. Users control the robot wirelessly through a custom app that sends commands for forward, backward, left, and right movements. The system integrates wireless communication with autonomous safety navigation for electronics students.
Parts used in the Android and Bluetooth Controlled Robot:
- PIC16F877A
- L293D IC
- 7805 IC
- LCD 16×2
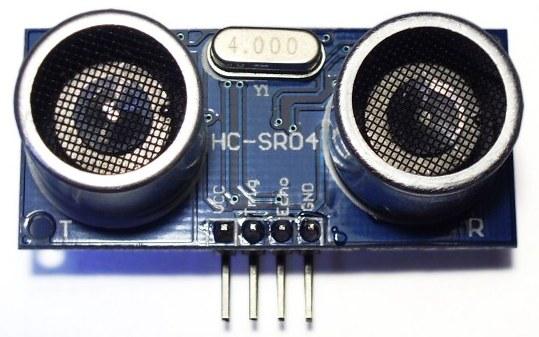
- Ultrasonic Sensor HC-SR04
- Crystal 20MHz
- Transistor BC548
- Resistor (10Kx2, 1Kx2)
- Capacitor (33pfx2, 10uF/16V)
- PCB
- DC gear motor (100 rpm x 2)
- Robot frame and wheels
- HC-06 / HC-05 Bluetooth module
Last time we had a project on Arduino robots with Bluetooth and Android, and in that one our readers Mr. Paul asked how he can make an obstacle avoidance robot. So today I came up with another engineering project for electronics and communication students, Android and Bluetooth controlled robot using PIC Microcontroller with object detecting capability.
 After installing MikroElectron’s Robot Control App from Play Store you should be able to control the robot with your android phone/ tablet over bluetooth signal. The eye catching feature of this project is the ‘objects detection’ capability with the help of Ultrasonic sensor, so you don’t have to worry about the robot hitting any object or wall in front of it. Robot will navigate safely without touching any obstacles. Moreover it will make beep sounds if any obstacle is found and a LCD screen is used to display distance to the specified object.
After installing MikroElectron’s Robot Control App from Play Store you should be able to control the robot with your android phone/ tablet over bluetooth signal. The eye catching feature of this project is the ‘objects detection’ capability with the help of Ultrasonic sensor, so you don’t have to worry about the robot hitting any object or wall in front of it. Robot will navigate safely without touching any obstacles. Moreover it will make beep sounds if any obstacle is found and a LCD screen is used to display distance to the specified object.
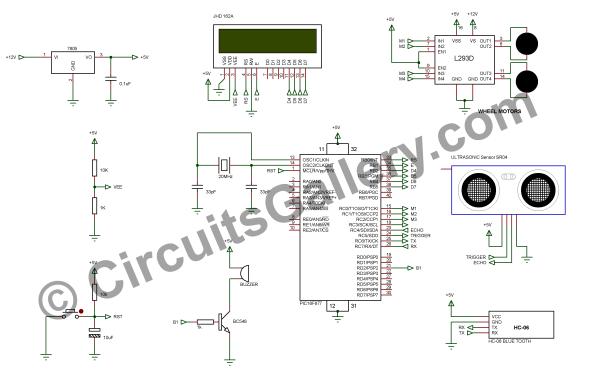
Speaking about the hardware, I’ve used PIC16F877A to control the robot, ultrasonic sensor will generate ultrasonic pulses to detect objects and calculate the distance, LCD screen to display distance, HC-06 / HC-05 Bluetooth module for communicating to Robot wirelessly.
Components for Android Robot
- PIC16F877A
- L293D IC
- 7805 IC
- LCD 16×2
- Ultrasonic Sensor HC-SR04
- Crystal 20MHz
- Transistor BC548
- Resistor (10Kx2, 1Kx2)
- Capacitor (33pfx2, 10uF/16V)
- PCB
- DC gear motor (100 rpm x 2)
- Robot frame and wheels
Circuit Diagram of Bluetooth Controlled Robot
Working of Obstacle avoidance robot
For simplicity let’s consider this project having 2 parts- Bluetooth navigation section and object detection section.
- HC-06 / HC-05 Bluetooth module is used to receive data from android based device.
- After pairing (connecting) the Bluetooth module with android phone or tablet, open the application and connect to the paired device HC-06 or HC-05.
- Android application will send letters ‘F’, ‘B’, ‘R’ and ‘L’ to move robot forward, backward, right and left respectively.
- These are received by the Bluetooth receiver, those letters are available in TX pin of HC-06..
For more detail: Object Detecting Android Mobile Phone Controlled Bluetooth Robot Using PIC Microcontroller 16F877A
- How can I control the robot?
You can control the robot using an Android phone or tablet over a Bluetooth signal after installing MikroElectron's Robot Control App. - What is the main feature of this project?
The eye-catching feature is the object detection capability using an ultrasonic sensor that prevents the robot from hitting walls. - Does the robot make sounds when it detects an obstacle?
Yes, the robot makes beep sounds if any obstacle is found. - What does the LCD screen display?
The LCD screen is used to display the distance to the specified object. - Which microcontroller is used to control the robot?
The project uses a PIC16F877A to control the robot. - What letters does the Android application send to move the robot?
The application sends letters F, B, R, and L to move the robot forward, backward, right, and left respectively. - Where are the received letters available on the Bluetooth module?
The received letters are available in the TX pin of the HC-06 module. - Can the robot navigate safely without touching obstacles?
Yes, the robot will navigate safely without touching any obstacles due to its object detection capability.
