Summary of ESP8266 wifi module interfacing with pic microcontroller
This article details interfacing an ESP8266-01 module with a PIC18F4550 microcontroller to create a TCP client for IoT data transmission and reception using the Thingspeak platform. The system utilizes AT commands over UART communication to connect to Wi-Fi, establish server connections, and exchange sensor data. The provided C code demonstrates configuration for both sending data to and retrieving data from a public channel.
Parts used in the ESP8266 and PIC18F4550 IoT Project:
- ESP8266-01 Module
- PIC18F4550 Microcontroller
- USB to Serial Converter
- Thingspeak Server (IoT Platform)
- C Programming Environment for PIC18F4550
Introduction
ESP8266 module is low cost standalone wireless transceiver that can be used for end-point IoT developments.
ESP8266 module enables internet connectivity to embedded applications. It uses TCP/UDP communication protocol to connect with server/client.
To communicate with the ESP8266 module, the microcontroller needs to use a set of AT commands. The microcontroller communicates with ESP8266-01 module using UART having specified Baud rate (Default 115200).
To know more about ESP8266 Module and its firmware refer ESP8266 Module
Now let’s interface ESP8266 Module with PIC18F4550
Interface diagram

TCP Client using ESP8266
Let’s program PIC18F4550 to configure ESP8266 module as TCP Client and Receive/Send data from/to Server using WIFI.
Here, we are using Thingspeak server for TCP Client demo purpose.
Thingspeak is an open IOT platform where anyone can visualize and analyse live data from their sensor devices. Also, we can perform data analysis on data posted by remote devices with Matlab code in Thingspeak. To learn more about Thingspeak refer link
https://thingspeak.com/pages/learn_more
Just sign up and create channel. We have below channel and write key on Thingspeak for data send and receive.
- channel ID is = 119922
- Write Key is = C7JFHZY54GLCJY38
Note: Do not forget to tick Make Public field in channel setting option on your thingspeak channel. It makes channel available to use as public. This allows any user to access channel data without any username & password.
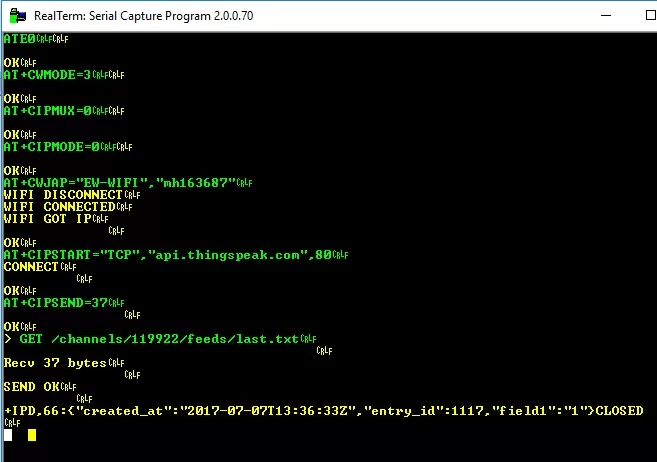
For TCP RECEIVE method use below AT command steps shown in screenshot of RealTerm Serial Terminal.
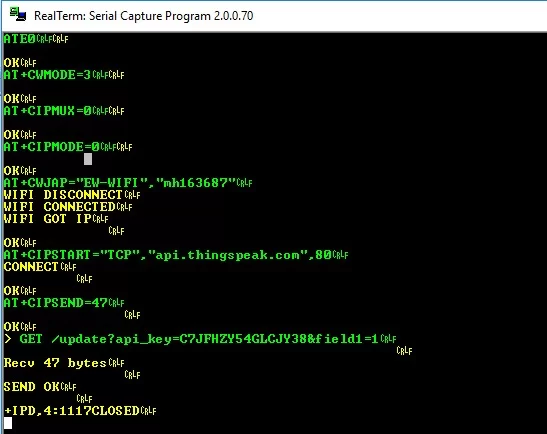
Below screenshot consists of AT commands (Green) and Responses (Yellow).
For TCP SEND method use below AT command steps shown in screenshot of RealTerm Serial Terminal.
In below program of TCP Client, do the following
For TCP Client RECEIVE demo
#define RECEIVE_DEMO /* Define Receive demo */
//#define SEND_DEMO /* Define Send demo */
For TCP Client SEND demo
//#define RECEIVE_DEMO /* Define Receive demo */
#define SEND_DEMO /* Define Send demo */
Edit Fields below with respective data
/* Define Required fields shown below */
#define DOMAIN "api.thingspeak.com"
#define PORT "80"
#define API_WRITE_KEY "thingspeak Write Key"
#define CHANNEL_ID "thingspeak Channel ID"
#define SSID "WiFi SSID"
#define PASSWORD "WiFi Password"
In below program, we are using response based functions to get better status if things deviate from normal.
Program
/*
* TCP Client using ESP8266 & PIC
* http://www.electronicwings.com
*/
#include <string.h>
#include <stdio.h>
#include <stdint.h>
#include <stdlib.h>
#include <stdbool.h>
#include <pic18f4550.h>
#include "USART_Header_File.h"
#include "Configuration_header_file.h"
#define DEFAULT_BUFFER_SIZE 160
#define DEFAULT_TIMEOUT 10000
/* Connection Mode */
#define SINGLE 0
#define MULTIPLE 1
/* Application Mode */
#define NORMAL 0
#define TRANSPERANT 1
/* Application Mode */
#define STATION 1
#define ACCESSPOINT 2
#define BOTH_STATION_AND_ACCESPOINT 3
/* Select Demo */
#define RECEIVE_DEMO /* Define RECEIVE demo */
//#define SEND_DEMO /* Define SEND demo */
/* Define Required fields shown below */
#define DOMAIN "api.thingspeak.com"
#define PORT "80"
#define API_WRITE_KEY "C7JFHZY54GLCJY38"
#define CHANNEL_ID "119922"
#define SSID "ssid"
#define PASSWORD "password"
enum ESP8266_RESPONSE_STATUS{
ESP8266_RESPONSE_WAITING,
ESP8266_RESPONSE_FINISHED,
ESP8266_RESPONSE_TIMEOUT,
ESP8266_RESPONSE_BUFFER_FULL,
ESP8266_RESPONSE_STARTING,
ESP8266_RESPONSE_ERROR
};
enum ESP8266_CONNECT_STATUS {
ESP8266_CONNECTED_TO_AP,
ESP8266_CREATED_TRANSMISSION,
ESP8266_TRANSMISSION_DISCONNECTED,
ESP8266_NOT_CONNECTED_TO_AP,
ESP8266_CONNECT_UNKNOWN_ERROR
};
enum ESP8266_JOINAP_STATUS {
ESP8266_WIFI_CONNECTED,
ESP8266_CONNECTION_TIMEOUT,
ESP8266_WRONG_PASSWORD,
ESP8266_NOT_FOUND_TARGET_AP,
ESP8266_CONNECTION_FAILED,
ESP8266_JOIN_UNKNOWN_ERROR
};
int8_t Response_Status;
volatile int16_t Counter = 0, pointer = 0;
uint32_t TimeOut = 0;
char RESPONSE_BUFFER[DEFAULT_BUFFER_SIZE];
void Read_Response(char* _Expected_Response)
{
uint8_t EXPECTED_RESPONSE_LENGTH = strlen(_Expected_Response);
uint32_t TimeCount = 0, ResponseBufferLength;
char RECEIVED_CRLF_BUF[30];
while(1)
{
if(TimeCount >= (DEFAULT_TIMEOUT+TimeOut))
{
TimeOut = 0;
Response_Status = ESP8266_RESPONSE_TIMEOUT;
return;
}
if(Response_Status == ESP8266_RESPONSE_STARTING)
{
Response_Status = ESP8266_RESPONSE_WAITING;
}
ResponseBufferLength = strlen(RESPONSE_BUFFER);
if (ResponseBufferLength)
{
MSdelay(1);
TimeCount++;
if (ResponseBufferLength==strlen(RESPONSE_BUFFER))
{
for (uint16_t i=0;i<ResponseBufferLength;i++)
{
memmove(RECEIVED_CRLF_BUF, RECEIVED_CRLF_BUF + 1, EXPECTED_RESPONSE_LENGTH-1);
RECEIVED_CRLF_BUF[EXPECTED_RESPONSE_LENGTH-1] = RESPONSE_BUFFER[i];
if(!strncmp(RECEIVED_CRLF_BUF, _Expected_Response, EXPECTED_RESPONSE_LENGTH))
{
TimeOut = 0;
Response_Status = ESP8266_RESPONSE_FINISHED;
return;
}
}
}
}
MSdelay(1);
TimeCount++;
}
}
void ESP8266_Clear()
{
memset(RESPONSE_BUFFER,0,DEFAULT_BUFFER_SIZE);
Counter = 0; pointer = 0;
}
void Start_Read_Response(const char* _ExpectedResponse)
{
Response_Status = ESP8266_RESPONSE_STARTING;
do {
Read_Response(_ExpectedResponse);
} while(Response_Status == ESP8266_RESPONSE_WAITING);
}
void GetResponseBody(char* Response, uint16_t ResponseLength)
{
uint16_t i = 12;
char buffer[5];
while(Response[i] != '\r')
++i;
strncpy(buffer, Response + 12, (i - 12));
ResponseLength = atoi(buffer);
i += 2;
uint16_t tmp = strlen(Response) - i;
memcpy(Response, Response + i, tmp);
if(!strncmp(Response + tmp - 6, "\r\nOK\r\n", 6))
memset(Response + tmp - 6, 0, i + 6);
}
bool WaitForExpectedResponse(const char* ExpectedResponse)
{
Start_Read_Response(ExpectedResponse); /* First read response */
if((Response_Status != ESP8266_RESPONSE_TIMEOUT))
return true; /* Return true for success */
return false; /* Else return false */
}
bool SendATandExpectResponse(char* ATCommand, const char* ExpectedResponse)
{
ESP8266_Clear();
USART_SendString(ATCommand); /* Send AT command to ESP8266 */
USART_SendString("\r\n");
return WaitForExpectedResponse(ExpectedResponse);
}
bool ESP8266_ApplicationMode(uint8_t Mode)
{
char _atCommand[20];
memset(_atCommand, 0, 20);
sprintf(_atCommand, "AT+CIPMODE=%d", Mode);
_atCommand[19] = 0;
return SendATandExpectResponse(_atCommand, "\r\nOK\r\n");
}
bool ESP8266_ConnectionMode(uint8_t Mode)
{
char _atCommand[20];
memset(_atCommand, 0, 20);
sprintf(_atCommand, "AT+CIPMUX=%d", Mode);
_atCommand[19] = 0;
return SendATandExpectResponse(_atCommand, "\r\nOK\r\n");
}
bool ESP8266_Begin()
{
for (uint8_t i=0;i<5;i++)
{
if(SendATandExpectResponse("ATE0","\r\nOK\r\n")||SendATandExpectResponse("AT","\r\nOK\r\n"))
return true;
}
return false;
}
bool ESP8266_Close()
{
return SendATandExpectResponse("AT+CIPCLOSE=1", "\r\nOK\r\n");
}
bool ESP8266_WIFIMode(uint8_t _mode)
{
char _atCommand[20];
memset(_atCommand, 0, 20);
sprintf(_atCommand, "AT+CWMODE=%d", _mode);
_atCommand[19] = 0;
return SendATandExpectResponse(_atCommand, "\r\nOK\r\n");
}
uint8_t ESP8266_JoinAccessPoint(const char* _SSID, const char* _PASSWORD)
{
char _atCommand[60];
memset(_atCommand, 0, 60);
sprintf(_atCommand, "AT+CWJAP=\"%s\",\"%s\"", _SSID, _PASSWORD);
_atCommand[59] = 0;
if(SendATandExpectResponse(_atCommand, "\r\nWIFI CONNECTED\r\n"))
return ESP8266_WIFI_CONNECTED;
else{
if(strstr(RESPONSE_BUFFER, "+CWJAP:1"))
return ESP8266_CONNECTION_TIMEOUT;
else if(strstr(RESPONSE_BUFFER, "+CWJAP:2"))
return ESP8266_WRONG_PASSWORD;
else if(strstr(RESPONSE_BUFFER, "+CWJAP:3"))
return ESP8266_NOT_FOUND_TARGET_AP;
else if(strstr(RESPONSE_BUFFER, "+CWJAP:4"))
return ESP8266_CONNECTION_FAILED;
else
return ESP8266_JOIN_UNKNOWN_ERROR;
}
}
uint8_t ESP8266_connected()
{
SendATandExpectResponse("AT+CIPSTATUS", "\r\nOK\r\n");
if(strstr(RESPONSE_BUFFER, "STATUS:2"))
return ESP8266_CONNECTED_TO_AP;
else if(strstr(RESPONSE_BUFFER, "STATUS:3"))
return ESP8266_CREATED_TRANSMISSION;
else if(strstr(RESPONSE_BUFFER, "STATUS:4"))
return ESP8266_TRANSMISSION_DISCONNECTED;
else if(strstr(RESPONSE_BUFFER, "STATUS:5"))
return ESP8266_NOT_CONNECTED_TO_AP;
else
return ESP8266_CONNECT_UNKNOWN_ERROR;
}
uint8_t ESP8266_Start(uint8_t _ConnectionNumber, const char* Domain, const char* Port)
{
bool _startResponse;
char _atCommand[60];
memset(_atCommand, 0, 60);
_atCommand[59] = 0;
if(SendATandExpectResponse("AT+CIPMUX?", "CIPMUX:0"))
sprintf(_atCommand, "AT+CIPSTART=\"TCP\",\"%s\",%s", Domain, Port);
else
sprintf(_atCommand, "AT+CIPSTART=\"%d\",\"TCP\",\"%s\",%s", _ConnectionNumber, Domain, Port);
_startResponse = SendATandExpectResponse(_atCommand, "CONNECT\r\n");
if(!_startResponse)
{
if(Response_Status == ESP8266_RESPONSE_TIMEOUT)
return ESP8266_RESPONSE_TIMEOUT;
return ESP8266_RESPONSE_ERROR;
}
return ESP8266_RESPONSE_FINISHED;
}
uint8_t ESP8266_Send(char* Data)
{
char _atCommand[20];
memset(_atCommand, 0, 20);
sprintf(_atCommand, "AT+CIPSEND=%d", (strlen(Data)+2));
_atCommand[19] = 0;
SendATandExpectResponse(_atCommand, "\r\nOK\r\n>");
if(!SendATandExpectResponse(Data, "\r\nSEND OK\r\n"))
{
if(Response_Status == ESP8266_RESPONSE_TIMEOUT)
return ESP8266_RESPONSE_TIMEOUT;
return ESP8266_RESPONSE_ERROR;
}
return ESP8266_RESPONSE_FINISHED;
}
int16_t ESP8266_DataAvailable()
{
return (Counter - pointer);
}
uint8_t ESP8266_DataRead()
{
if(pointer < Counter)
return RESPONSE_BUFFER[pointer++];
else{
ESP8266_Clear();
return 0;
}
}
uint16_t Read_Data(char* _buffer)
{
uint16_t len = 0;
MSdelay(100);
while(ESP8266_DataAvailable() > 0)
_buffer[len++] = ESP8266_DataRead();
return len;
}
void interrupt ISR() /* Receive ISR routine */
{
uint8_t oldstatus = STATUS;
INTCONbits.GIE = 0;
if(RCIF==1){
RESPONSE_BUFFER[Counter] = RCREG; /* Copy data to buffer & increment counter */
Counter++;
if(RCSTAbits.OERR) /* check if any overrun occur due to continuous reception */
{
CREN = 0;
NOP();
CREN = 1;
}
if(Counter == DEFAULT_BUFFER_SIZE){
Counter = 0; pointer = 0;
}
}
INTCONbits.GIE = 1;
STATUS = oldstatus;
}
int main(void)
{
char _buffer[150];
uint8_t Connect_Status;
#ifdef SEND_DEMO
uint8_t Sample = 0;
#endif
OSCCON = 0x72; /* Set internal clock to 8MHz */
USART_Init(115200); /* Initiate USART with 115200 baud rate */
INTCONbits.GIE=1; /* enable Global Interrupt */
INTCONbits.PEIE=1; /* enable Peripheral Interrupt */
PIE1bits.RCIE=1; /* enable Receive Interrupt */
while(!ESP8266_Begin());
ESP8266_WIFIMode(BOTH_STATION_AND_ACCESPOINT);/* 3 = Both (AP and STA) */
ESP8266_ConnectionMode(SINGLE); /* 0 = Single; 1 = Multi */
ESP8266_ApplicationMode(NORMAL); /* 0 = Normal Mode; 1 = Transperant Mode */
if(ESP8266_connected() == ESP8266_NOT_CONNECTED_TO_AP)
ESP8266_JoinAccessPoint(SSID, PASSWORD);
ESP8266_Start(0, DOMAIN, PORT);
while(1)
{
Connect_Status = ESP8266_connected();
if(Connect_Status == ESP8266_NOT_CONNECTED_TO_AP)
ESP8266_JoinAccessPoint(SSID, PASSWORD);
if(Connect_Status == ESP8266_TRANSMISSION_DISCONNECTED)
ESP8266_Start(0, DOMAIN, PORT);
#ifdef SEND_DEMO
memset(_buffer, 0, 150);
sprintf(_buffer, "GET /update?api_key=%s&field1=%d", API_WRITE_KEY, Sample++);
ESP8266_Send(_buffer);
MSdelay(20000); /* Thingspeak server delay */
#endif
#ifdef RECEIVE_DEMO
memset(_buffer, 0, 150);
sprintf(_buffer, "GET /channels/%s/feeds/last.txt", CHANNEL_ID);
ESP8266_Send(_buffer);
Read_Data(_buffer);
MSdelay(600);
#endif
}
}
ESP8266 Response
At the client end, we need to check ESP8266 responses. We can check it on the serial terminal of PC/Laptop. Connect ESP8266 module transmit pin (TX) to the receive pin (RX) of PIC18F4550 Microcontroller and to the receive pin (RX) of usb to serial converter as shown in below figure. connect usb to serial converter to PC/Laptop. Open the serial terminal on PC/Laptop to see the ESP8266 responses for the AT command sent from PIC18F4550 microcontroller.

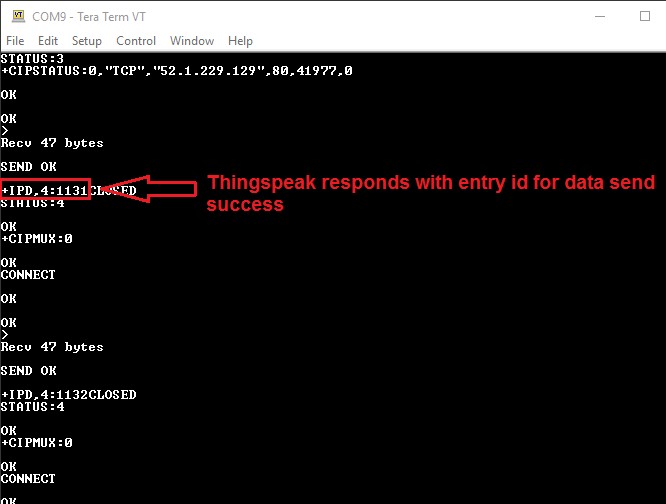
Now for TCP SEND commands (sent from PIC18F4550 Microcontroller), we can see the below response from ESP8266 on the serial terminal for the thingspeak server.

In response with TCP SEND we get the data entry no. as shown in above figure i.e. 1131, 1132, and so on.
For TCP RECEIVE commands (sent from PIC18F4550 Microcontroller), we can see the below response from ESP8266 on the serial terminal for the thingspeak server.
In response with TCP RECEIVE we get the last entry data for field1 on thingspeak as shown in above figure.
Note: here we are retrieving the last entry data on field1 of thingspeak server hence we get the last updated data of field1 from server as shown in above figure i.e. “field1”:”11”. In program, we used “GET /channels/119922/feeds/last.txt” to receive last updated data only.
Updates at thingspeak server on TCP SEND
For TCP SEND we can see the output at server end. Here we are using thingspeak server and sending the incremented count at field1 on server. We get incremented count at field1 of thingspeak server as shown in below figure.
Supporting Files
Source Code:
- PIC18F4550 ESP8266 WiFi Project file Download 1575
Attached File:
For another similar project visit here: ESP8266 wifi module interfacing with pic microcontroller
- How does the microcontroller communicate with the ESP8266 module?
The microcontroller communicates with the ESP8266-01 module using UART with a specified Baud rate, defaulting to 115200. - What protocol does the ESP8266 module use to connect with servers?
The module uses TCP/UDP communication protocols to connect with servers or clients. - Can anyone access the Thingspeak channel data without a username and password?
Yes, if the Make Public field is ticked in the channel setting option on Thingspeak. - Which AT command sets the Wi-Fi mode on the ESP8266?
The AT+CWMODE command is used to set the Wi-Fi mode, such as station or access point. - How can I configure the ESP8266 to act as a TCP Client?
You must program the PIC18F4550 to send specific AT commands that configure the module as a TCP Client. - What function retrieves the last updated data from a Thingspeak channel?
The program uses the GET request /channels/[Channel ID]/feeds/last.txt to receive the last entry data. - What happens if the ESP8266 connection times out during AP joining?
The system returns the status ESP8266_CONNECTION_TIMEOUT if the connection times out. - How do you verify if the ESP8266 is connected to the Access Point?
The system checks the response buffer for STATUS:2 which indicates the device is connected to the AP.