Summary of MC33035 Brushless motor driver breakout board
This article describes a breakout board for the MC33035 brushless DC motor controller. The board serves as a driver interface, requiring external MOSFETs or an IPM module to function. Key features include six PWM and inverse pulse outputs, jumpers for direction/enable/brake control, a header for Hall sensors, power/fault LEDs, and a speed potentiometer. The MC33035 IC handles rotor decoding, oscillator generation, and protective features like thermal shutdown and current limiting for 60°/120° or 120°/240° sensor phasing.
Parts used in the MC33035 Brushless Motor Driver:
- MC33035 IC
- Output buffer IPM module or Mosfets
- Jumpers for Direction, Enable, and Brake
- Header connector for Hall sensors
- On board LED for Power and fault
- P1 potentiometer for speed control
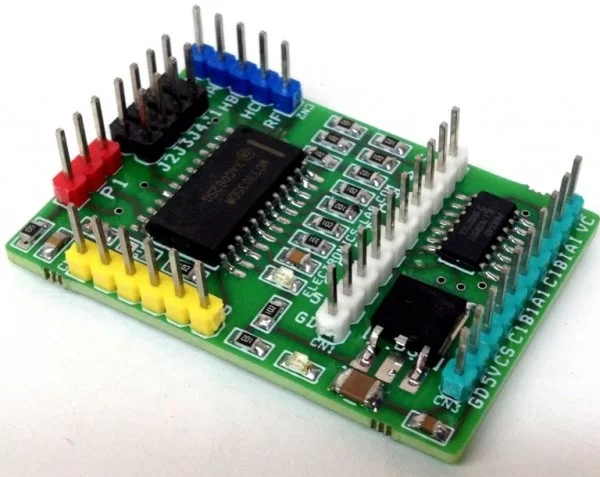
The board shown here is a breakout board for MC33035 brushless motor controller. It requires an output buffer IPM module or Mosfets to complete the closed loop brushless motor driver. MC33035 IC is the heart of the project; the project provides 6 PWM pulses as well 6 Inverse pulses outputs. On board Jumpers helps to change the Direction, Enable, Brake, and 60/120 phasing Header connector provided to connect the Hall sensors and supply, on board LED for Power and fault, P1 potentiometer helps to change the speed.
The MC33035 is a high performance second generation monolithic brushless DC motor controller containing all of the active functions required to implement a full featured open loop, three or four phase motor control system. This device consists of a rotor position decoder for proper commutation sequencing, temperature compensated reference capable of supplying sensor power, frequency programmable saw tooth oscillator, three open collector top drivers, and three high current totem pole bottom drivers ideally suited for driving power MOSFETs. Also included are protective features consisting of under voltage lockout, cycle−by−cycle current limiting with a selectable time delayed latched shutdown mode, internal thermal shutdown, and a unique fault output that can be interfaced into microprocessor controlled systems. Typical motor control functions include open loop speed, forward or reverse direction, run enable, and dynamic braking. The MC33035 is designed to operate with electrical sensor phasings of 60°/300° or 120°/240°, and can also efficiently control brush DC motors.
An internal rotor position decoder monitors the three sensor inputs (Pins 4, 5, 6) to provide the proper sequencing of the top and bottom drive outputs. The sensor inputs are designed to interface directly with open collector type Hall Effect switches or opto slotted couplers. Internal pull−up resistors are included to minimize the required number of external components. The inputs are TTL compatible, with their thresholds typically at 2.2 V. The MC33035 series is designed to control three phase motors and operate with four of the most common conventions of sensor phasing. A 60°/120° Select (Pin 22) is conveniently provided and affords the MC33035 to configure itself to control motors having either 60°, 120°, 240° or 300° electrical sensor phasing. With three sensor inputs there are eight possible input code combinations, six of which are valid rotor positions. The remaining two codes are invalid and are usually caused by an open or shorted sensor line. With six valid input codes, the decoder can resolve the motor rotor position to within a window of 60 electrical degrees. The Forward/Reverse input (Pin 3) is used to change the direction of motor rotation by reversing the voltage across the stator winding. When the input changes state, from high to low with a given sensor input code (for example 100), the enabled top and bottom drive outputs with the same alpha designation are exchanged (AT to AB, BT to BB, CT to CB). In effect, the commutation sequence is reversed and the motor changes directional rotation. Motor on/off control is accomplished by the Output Enable (Pin 7). When left disconnected, an internal 25 Μa current source enables sequencing of the top and bottom
drive outputs. When grounded, the top drive outputs turn off and the bottom drives are forced low, causing the motor to coast and the Fault output to activate. Dynamic motor braking allows an additional margin of safety to be designed into the final product. Braking is accomplished by placing the Brake Input (Pin 23) in a high state. This causes the top drive outputs to turn off and the bottom drives to turn on, shorting the motor−generated back EMF. The brake input has unconditional priority over all other inputs. The internal 40 kΩ pull−up resistor simplifies interfacing with the system safety−switch by insuring brake activation if opened or disconnected. The commutation logic truth table is shown in Figure 20. A four input NOR gate is used to monitor the brake input and the inputs to the three top drive output transistors. Its purpose is to disable braking until the top drive outputs attain a high state. This helps to prevent simultaneous conduction of the the top and bottom power switches. In half wave motor drive applications, the top drive outputs are not required and are normally left disconnected. Under these conditions braking will still be accomplished since the NOR gate senses the base voltage to the top drive output transistors.
Read more: MC33035 Brushless motor driver breakout board
- What components are required to complete the closed loop brushless motor driver?
An output buffer IPM module or Mosfets are required to complete the circuit. - How does the project provide motor control signals?
The project provides 6 PWM pulses as well as 6 Inverse pulses outputs. - Can the MC33035 support different sensor phasings?
Yes, it operates with electrical sensor phasings of 60°/300° or 120°/240°. - What is the function of the P1 potentiometer on the board?
The P1 potentiometer helps to change the speed of the motor. - How is dynamic braking accomplished on this board?
Braking is accomplished by placing the Brake Input in a high state to short the back EMF. - Does the MC33035 have internal protection features?
Yes, it includes under voltage lockout, cycle-by-cycle current limiting, and internal thermal shutdown. - What types of sensors can interface directly with the MC33035?
The sensor inputs are designed to interface directly with open collector type Hall Effect switches or opto slotted couplers. - How is the motor direction changed?
The Forward/Reverse input changes the direction by reversing the voltage across the stator winding.