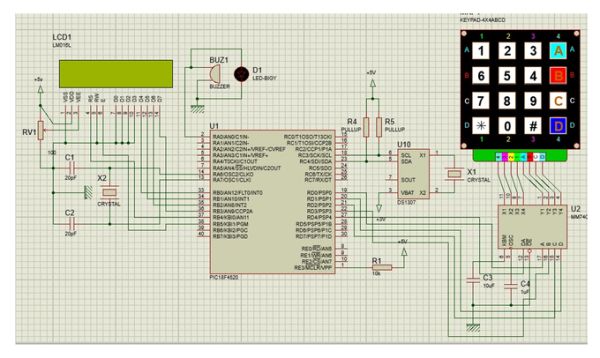
PIC16F877A is an easy micro controller for the beginners Here in project: 1) How PIC switches servo motor forward and back ward When we push one switch it goes to positive 90 degree , on second switch it moves backward to negative 90 degree a. MickroC PRO // for programming of MICRO CONTROLLER b. Proteous […]