Summary of CCS C SUMO ROBOT PROJECT PIC16F876
This article details the design of a mini-sumo robot controlled by a PIC16F876 microcontroller. It utilizes an FSM for advanced control logic, employing PWM for motor speed and ADCs for sensor data. The hardware includes Sharp GP2D12 range finders and Fairchild QRD-1114 edge detectors, driven by SN754410 or LM293D H-bridges. Power is supplied via dual NiMh batteries with voltage regulation. The software uses CCS C and features a debug menu logging state transitions to EEPROM for troubleshooting.
Parts used in the Mini-Sumo Robot:
- PIC 16F876 Microcontroller
- LM293D H-Bridge (or SN754410)
- Sharp GP2D12 Analog Range Sensors
- Fairchild QRD-1114 IR Edge Detectors
- NiMh 9 Volt Batteries (Dual Pack)
- National LM2940 5V Low-Dropout Regulator
- 20 MHz Crystal Oscillator
- Texas Instruments SN754410 Quadruple Half-H Driver
- Data EEPROM
- Slide Switches
Design a perfectly good sumo robot design and control circuit pic 16f876 based on the motor drive lm293d drizzle detection for the sharp gp2d12 sensors used hardware and software in detail about (english) Information Additional file given in (…. Electronics Projects, CCS C Sumo Robot Project PIC16F876 “ccs c examples, microchip projects, microcontroller projects, pic16f876 projects,
Design a perfectly good sumo robot design and control circuit pic 16f876 based on the motor drive lm293d drizzle detection for the sharp gp2d12 sensors used hardware and software in detail about (english) Information Additional file given in (. Doc) all sources CCS C software’s. Suma quite powerful robot body looks very well designed for various robot projects a body design was to be imitated
The PIC 16F876 is a very powerful micro-controller. In addition to the hardware features mentioned above, the software for Seeker II is fairly advanced. The main control loop is implemented as a formalized finite-state machine (FSM). Using an FSM eases the code management problems inherit in any complex piece of control software. The states currently implemented are as follows:
PIC16F876 SUMO ROBOT PROJECT
Sumo wrestling is a sport that originated in Japan, and typically involves two very large men trying to push each other out of a circular ring area. The robotic version of sumo wrestling involves two autonomous robots that try to push each other out a circular ring. Robotic sumo wrestling is very popular in Japan, with thousands of robots and tens of thousands of spectators at a large competition.
In North America, a new form of robotic sumo is starting to gain a following. Started by Bill Harrison (Sine Robotics, http://www.sinerobotics.com), autonomous mini-sumo robots can be simple and inexpensive to build for the beginner, while at the same time providing intense competition for robot builders at a more advanced level. Mini-sumo robots are half the size of regular sumo bots, and compete on a ring that is half the size as well.

The rules are fairly simple: two autonomous robots face off on a ring that is 77cm across, and the first one to touch outside the ring loses. The ring surface is black, and there is a 2.5cm white line around the outside top edge of the ring. The robot has to fit inside a 10cm x 10cm square tube placed vertically over it when it is in the start position on the ring, and it must weigh no more than 500 grams. The robot is not allowed to intentionally damage another robot, and must not damage the ring. The full rules can be found online at http://www.robotgames.com.
There are a number of mini-sumo kits that you can buy off the internet, but I decided that I wanted to come up with something a little different. And so, after a couple tries and a lot of thinking and design work, a new mini-sumo was born. One thing I did not need to think much about was which micro-controller to use – all my robots are controlled by Microchip PIC micro-controllers.
SUMO ROBOT HARDWARE FEATURES OF THE PIC USED
Several of the hardware features of the 16F876 are used, including:
• Two channel hardware pulse width modulation (PWM) is used to provide precise control over the speed of the two motors, without using up any processor time.
• Four analog to digital converters (ADC) are used to interface to two range-finder and two edge-detector sensors.
• One 16 bit hardware timer (Timer1) is used to increment a 32 bit integer millisecond counter, used for various timing functions.
• In the future, a close-range IR sensor will be added to Seeker II, and the 38 kHz pulse required will be driven by Timer0, an 8-bit hardware timer.
• The hardware UART is used both to program the PIC using the bootloader, and also to run a menu-driven debug system that allows me to test and calibrate the motors and sensors.
• The data EEPROM is used as a simple log to show state transitions – as the robot changes state, the current state is stored. If the robot exhibits strange behavior, I can see what state transitions led up to the behavior, which can be a great aid in debugging. The debug menu provides functions to display and erase the data EEPROM.
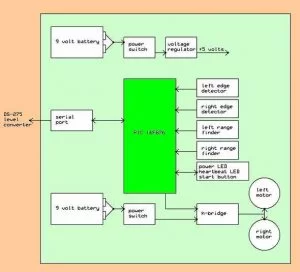
The rest of the electronics in Seeker II are very simple – a 5K pull-up resistor on the MCLR line, a 0.1 uf decoupling capacitor between ground and power on the PIC, a 20 MHz crystal, and a pair of 18 pf capacitors for the crystal. The motors are switched using a Texas Instruments SN754410 quadruple half-h driver chip, which is basically a one-amp version of the popular National LM293D h-bridge. Power to the electronics is provided by a nickel-metal-hydride (NiMh) 9 volt battery, and switched through a National LM2940 5 volt low-dropout regulator. Two capacitors are attached to the voltage regulator as suggested in the data sheet (0.47 uf and 22 uf). Power to the motors is provided from a second NiMh 9 volt battery. Each battery is switched separately using a pair of slide switches accessed from the underside of the chassis.
For sensors, the robot has two range finders and two edge detectors. The range finders are Sharp GP2D12 analog range sensors. They are cheap, simple to interface to, and provide very accurate results without being affected by ambient lighting conditions. The edge detectors are Fairchild QRD-1114 IR sensors. They also filter out most ambient light interference, and in general work exceptionally well.
source: circuitcellar.com% Sumo Robot Project ccs c source code robot schematic files alternative link
FILE DOWNLOAD LINK LIST (in TXT format): LINKS-7302.zip
Source: CCS C SUMO ROBOT PROJECT PIC16F876
- How does the robot manage complex control logic?
The main control loop is implemented as a formalized finite-state machine (FSM) to ease code management. - What method provides precise motor speed control?
Two-channel hardware pulse width modulation (PWM) is used without consuming processor time. - Which sensors are used for range finding?
The robot uses Sharp GP2D12 analog range sensors which are accurate and unaffected by ambient light. - How does the robot detect the ring edges?
It employs Fairchild QRD-1114 IR sensors that filter out most ambient light interference. - Can I use the data EEPROM for debugging?
Yes, the EEPROM logs state transitions to help identify causes of strange behavior. - What power source is recommended for the electronics?
A nickel-metal-hydride (NiMh) 9 volt battery switched through a National LM2940 5 volt regulator. - Does the robot have separate power for motors?
Yes, power to the motors is provided from a second NiMh 9 volt battery. - How is the robot programmed?
The hardware UART is used to program the PIC using a bootloader.