Summary of Temperature controlled fan using PIC 16F877A
This project describes a temperature-controlled fan system using a PIC16F877A microcontroller. The system uses an LM35 temperature sensor to measure ambient temperature, feeding the analog output to the microcontroller's ADC. Based on temperature readings, the microcontroller adjusts the DC motor's speed using PWM. Higher temperatures increase motor speed to provide cooling. The code manages temperature sensing, calibration, LCD display, and PWM duty cycles for different temperature ranges, enabling automatic temperature-based control of the fan speed.
Parts used in the Temperature Controlled Fan System:
- PIC16F877A Microcontroller
- LM35 Temperature Sensor
- DC Motor
- LCD Display
- Power Supply (5V)
- Crystal Oscillator (20 MHz)
- Motor Driver Circuit (for PWM control, implied)
- Connecting wires and breadboard or PCB
You might have come across several applications where we need to control a specific device based on analog parameter. This Embedded system works in a similar concept where we are about to control the speed of a DC motor using based on the external temperature. The rise in temperature will result in increase in speed of the motor and vice versa. These type of Temperature controlled fan systems can generally be used to maintain temperature of a room or object automatically.
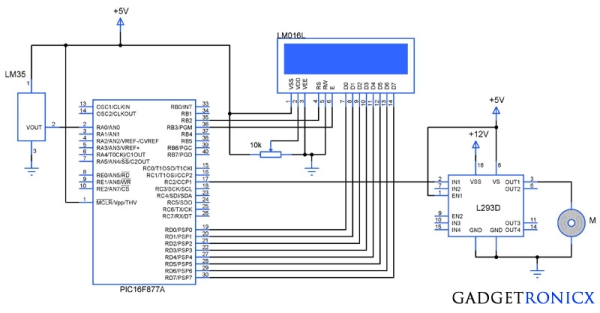
 DESIGN OF TEMPERATURE CONTROLLED FAN SYSTEM:
DESIGN OF TEMPERATURE CONTROLLED FAN SYSTEM:
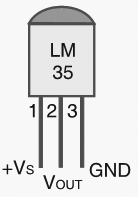
- The temperature is measured by means of a temperature sensor LM35.
- The output voltage of the sensor is fed to the A/D channel of the Microcontroller.
- Based on the sensed temperature the speed of the motor is controlled using PWM .
- Several temperature ranges was set in the code to vary the motor speed based on the level of temperature sensed.
- The speed of the motor is controlled by using PWM.
Lm 35 is used to sense the external temperature which is capable of sensing temperature ranges from -55 to 150 C. The output voltage is proportional to the temperature hence there is no need of trimmers to calibrate the reading. The output voltage of this sensor varies by 10mv per degree change in temperature.
 CALIBRATION:
CALIBRATION:
We are using a 10 bit ADC and Vcc as Vref to the ADC module of the Controller. So in order to determine the step size we have to divide the Vref by our resolution that is 2^10 ( 1024 ).
Step Size = 5 / 1024 = 4.83mV
We obtain a change of 10mV with each rise or fall in temperature from the sensor. And value in the ADC register will alter by two steps with each degree change in the sensor since two increments of step size i.e 4.833mV * 2 = 9.96mV which is approximately equal to 10mV. So in order to obtain the original value we have to divide the contents in the ADC register by 2
CODE:
This code was built using CCS compiler for PIC Microcontrollers.
#include <16F877A.h>
#device ADC=10 //Setting ADC bits
#FUSES NOWDT
#FUSES NOBROWNOUT
#FUSES NOLVP
#use delay(crystal=20000000)
#byte lcd=0x08
#byte TRIS_lcd=0x88
#bit rs=0x06.2
#bit en=0x06.3
#bit TRIS_rs=0x86.2
#bit TRIS_en=0x86.3
long int adc_value,real_value;
int i;
char value[4];
unsigned char text[]="Temperature:";
void display(unsigned char a, int b);
void motor();
void main()
{
TRIS_lcd=TRIS_rs=TRIS_en=0;
display(0x38,0);
display(0x01,0);
display(0x0c,0);
for(i=0;i<=12;i++)
{
display(text[i],1);
}
setup_timer_2(T2_DIV_BY_16,255,1); //Setting timers for PWM
SETUP_ADC_PORTS(AN0); //Setting ADC PORTS
SET_ADC_CHANNEL(0); //Selecting Channel
SETUP_ADC(ADC_CLOCK_INTERNAL);
while(TRUE)
{
delay_us(20);
adc_value=READ_ADC(); //Reading ADC value
delay_us(10);
real_value=adc_value/2; //Obtaining real value
motor();
sprintf(value,"%lu",real_value); //Changing int to char
display(0x8c,0);
for(i=0;i<=3;i++)
{
display(value[i],1);
}
}
}
void display(unsigned char a,int b) //LCD sub routine
{
lcd=a;
rs=b;
en=1;
delay_ms(10);
en=0;
delay_ms(10);
}
void motor()
{
if(real_value<10)
{
setup_ccp1(CCP_OFF);
}
if(real_value>10)
{
setup_ccp1(CCP_PWM);
if(real_value>=10&&real_value<=29)
{
set_pwm1_duty((int16)204); //20% duty cycle PWM
}
else if(real_value>=30&&real_value<=69)
{
set_pwm1_duty((int16)510); //50% duty cycle PWM
}
else if(real_value>=70&&real_value<=99)
{
set_pwm1_duty((int16)715); //70% duty cycle PWM
}
else if(real_value>=100&&real_value<=150)
{
set_pwm1_duty((int16)919); //90% duty cycle PWM
}
}
}The above code uses built in functions in the CCS compiler to use the A/D and PWM feature in the Microcontroller. The received analog value is calibrated to display the temperature in the LCD. The “real_value” int value is converted to character using “sprintf” in order to display the temperature values.
The temperature ranges and duty cycle of the PWM is given using the subroutine “.motor”. So the microcontroller runs a check on the temperature every time and alters the speed of the motor based on it.
For more detail: Temperature controlled fan using PIC 16F877A