Summary of DC motor and Fan speed control using Pic16f877 Microcontroller using PWM(Pulse width modulation) Technique
This article details a project to control DC motor or fan speed using a PIC16F877 microcontroller and Pulse Width Modulation (PWM). It explains that PWM varies the duty cycle of digital signals to adjust output voltage and current. The system uses six push buttons connected to Port A to select one of six speed levels, which adjusts the PWM duty cycle via Timer 2 and CCP1 pins. An L293D H-bridge driver is employed to handle the motor's power requirements, as the microcontroller cannot drive heavy loads directly. The code is written in C using the High Tech C compiler and MPLAB IDE.
Parts used in the PIC16F877 Fan Speed Control Project:
- Pic16f877 microcontroller
- L293d h-bridge Motor driver Ic
- DC Motor or small fan
- Crystal 20MHz
- Push Buttons
- Connecting wires
- Bread board or PCB
- Power Supply battery
Here is a simple project on how to control fan or dc motor speed with microchip pic16f877 microcontroller. There are numerous ways to control the speed of motor(or fan). Varying current, voltage and resistance etc. But when it comes to controlling the speed using microcontrollers. Then the PWM (Pulse width modulation) technique is most effective one. Pulse width modulation reduces the direct current/voltage pulse duration, which ultimately reduces the output current and voltage at output. In pulse width modulation the digital signal high and low time period is varied to output a desired voltage. Varying the dc voltage in pulses is know as duty cycle. A typical pulse width modulation diagram is show below with different duty cycles.
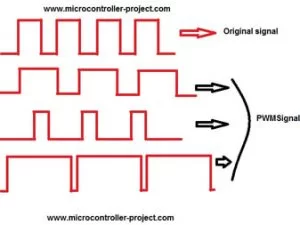
Varying duty cycle signals are shown in the pic on the right side. High pulse is generally termed as duty cycle. Original signal high pulse is 65% and low 35%. Thus original signal duty cycle is 65%. The work is only done in duty cycle period. Varying duty cycle signals are shown below the original. Duty cycle of easy signal is different then others. 70%, 30% and 90% respectively.
Pic microcontroller speed control project requirements
- Pic16f877 microcontroller
- L293d h-bridge Motor driver Ic
- DC Motor or small fan
- Crystal 20MHz
- Push Buttons
- connecting wires
- Bread board or PCB
- Power Supply battery
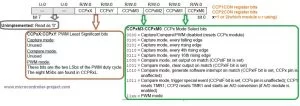
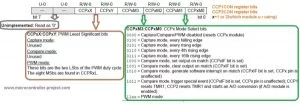
Registers associated with CCP1 & CCP2 Module.
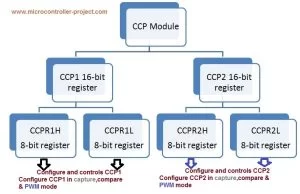
Note: Only Timer 2 can be used for PWM generation in Pic16f877.
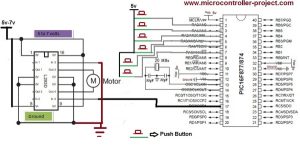
The circuit diagram of the project is given below. Six Push buttons are attached with port A of the pic16f877 microcontroller. These push buttons are used to change the speed of the motor. Their are six speed levels press these push buttons to change the speed of fan or motor. CCP1 pin is attached to L293d pin no 10. The motor rotates in anti clock wise direction when power is turn on. You can drive the motor in clock wise direction, just connect CCP1 with pin 15 of L293d and make pin 10 ground. 20 Mhz crystal is used in the project. Using a crystal of low frequency can also effect the motor speed.
In rundutycycle() function pwm signal in generated. The function of each instruction is given with it. The status of switches s1 to s6 are also checked in this function and duty cycle is varied according to the switches status. T2CON is timer 2 control register. To set its bit functions please refer to the data sheet of pic 16f877 microcontroller.
#include<htc.h>
#include<pic.h>
#define _XTAL_FREQ 20000000
void rundutycycle(unsigned int x );
#define s1 RA0
#define s2 RA1
#define s3 RA2
#define s4 RA3
#define s5 RA4
#define s6 RA5
void main()
{
ADCON1=0x06; //All pins as digital
TRISA=0b111111; //PortA as Input
TRISC2 = 0; //Make CCP1 pin as output
CCP1CON = 0x0C; //Configure CCP1 module in PWM mode
PR2 = 0xFF; //Configure the Timer2 period
rundutycycle(512);
}
void rundutycycle(unsigned int dutycyc){
T2CON = 0x01; // Set Prescaler to be 4, hence PWM frequency is set to 4.88KHz.
T2CON |= 0x04; // Enable the Timer2, hence enable the PWM.
while(1){
CCPR1L = dutycyc>>2; // Put MSB 8 bits in CCPR1L
CCP1CON &= 0xCF; // Make bit4 and 5 zero
CCP1CON |= (0x30&(dutycyc<<4)); // Assign Last 2 LSBs to CCP1CON
if(s1==1){dutycyc=172; }
if(s2==1){dutycyc=342; }
if(s3==1){dutycyc=512; }
if(s4==1){dutycyc=686; }
if(s5==1){dutycyc=858; }
if(s6==1){dutycyc=1020; }
dutycyc=dutycyc;
}
}
Download the project code, hex file(code) and simulation. Folder includes all the project files. The code is compiled using htc(high tech c compiler) and mplab . Simulation is made in proteaus 8.0.Please give us your feed back on the project.
- How does PWM control motor speed?
Pulse width modulation reduces direct current or voltage pulse duration by varying the high and low time periods to output a desired voltage. - Which pins on the Pic16f877 generate PWM output?
Port-c pin#1 and pin#2 are dedicated for generating pwm output and are named as CCP1 and CCP2. - What resolution does the PWM signal from Pic 16f877 provide?
The PWM signal provides 10-bit resolution, allowing it to calculate up to 1024 values. - Which timer can be used for PWM generation in Pic16f877?
Only Timer 2 can be used for PWM generation in Pic16f877. - Why is an L293d ic used in this circuit?
The microcontroller output voltage is too low to drive heavy loads like dc motors, so the L293d drives the motor as an H-Bridge circuit. - How many speed levels are available in this project?
There are six speed levels available, controlled by pressing the attached push buttons. - What instruction initializes Port A as digital I/O?
Loading 0x06 into the ADCON1 register makes all pins of Port A act as digital I/O instead of analog inputs. - What happens if the crystal frequency is too low?
Using a crystal of low frequency can affect the motor speed.