Summary of Autonomous Smart Suitcase Pixy Camera!
The Autonomous Smart Suitcase (ASS) is a self-following luggage system designed to reduce travel fatigue for commuters and those with mobility challenges. It utilizes computer vision, GPS, and wireless communication to track the user autonomously within indoor facilities like airports and hospitals. Key features include fall detection, lost mode alerts via SMS, and an LCD display for user information, eliminating the need for manual pushing.
Parts used in the Autonomous Smart Suitcase:
- Children electric motor gear box DC12V
- Suitcase
- Arduino Mega ADK or Mega 2560
- Adafruit Ultimate GPS Breakout with External Antenna
- Arduino GSM Shield
- L298N Motor Drive Controller
- HC-06 Wireless Bluetooth Serial Transceiver
- 10000 MAH Lipo Battery
- 16x2 Character LCD Display
- Sim Card
- Android Device
- Ultrasonic Module HC-SR04 Distance Measuring
- Pixy2 CMUcam5 Smart Vision Sensor
- 3 Axis Accelerometer Gyroscope
- Buzzer
- Arduino Uno
- Definition
ASS is an autonomous smart suitcase that will follow the user wherever he goes. Apart from this it also has additional features such as lost mode, bag fall detection and an LCD to display the user information. The bag will mainly be used by commuters, handicapped people and others in indoor facilities.

We all know the hassle of pushing along our baggage in the airport. It is a tedious process that aggravates our tiredness and difficulty during the journey. The aim of our project “autonomous smart suitcase” is to eliminate the issue of pushing the suitcase around. Not only this I will also be adding additional functionality to the suitcase that will make my suitcase more easy to use and convenient.
- Applications
ASS has applications in the following areas:
· Airports as luggage
· Universities
· Hospitals
· Offices
· Other indoor facilities
Step 1: Components Required

List of Components:
_Hardware_
Children electric motor gear box,DC12V
Suitcase as you like.
Arduino Mega ADK Or Mega 2560.
Adafruit Ultimate GPS Breakout with External Antenna.
Arduino GSM Shield.
L298N Motor Drive Controller.
HC-06 Wireless Bluetooth Serial Transceiver.
10000 MAH Lipo Battery Or Any Capacity you want.
16×2 Character LCD Display.
Sim Card.
Android Device. “Any mobile phone or tablet”
Ultrasonic Module HC-SR04 Distance Measuring.
Pixy2 CMUcam5 Smart Vision Sensor.
3 Axis Accelerometer Gyroscope.
buzzer.
arduino uno.
_ Software_
Step 2: Project Specification and Objectives

- Specification
•Max weight of luggage: 7 Kg.
•Speed: 5 km/h.
•Operating Time on full charge: 3 Hours.
•Wireless: Bluetooth, GPRS, and GPS.
•Image recognition: 2 m Max distance, 20 cm stop
- Objectives
1.Simulates the latest advanced technology of the actual autonomously following.
2.Reduces the need for the human control interference.
3.Acquires capability to develop the artificial intelligence systems.
4.Acquiring the ability to integrate theoretical knowledge and practical skills by designing a real-world application based on specification requirements
Step 3: Parts Description

Pixy2 CMUcam5 Smart Vision Sensor.
Pixy2 is smaller, faster and more capable than the original Pixy. Like its predecessor, Pixy2 can learn to detect objects that you teach it, just by pressing a button. Additionally, Pixy2 has new algorithms that detect and track lines for use with line-following robots. The new algorithms can detect intersections and “road signs” as well. The road signs can tell your robot what to do, such as turn left, turn right, slow down, etc. And Pixy2 does all of this at 60 frames-per-second, so your robot can be fast, too. Find More HERE|
L298N Motor Drive Controller.
L-298 has two enable input to control any device by enabling or disabling it. L 298 IC is most commonly used to make motor drivers or motor controllers. These motor controllers can be controlled by any micro controller e.g Arduino, PIC, Raspberry Pi etc. They receives input from micro controllers and operate the load attached to their output terminals correspondingly. L-298 motor driver (H-Bridge) is able to control two different DC motors simultaneously. While it can control a single stepper motor as well. L 298 has two Pulse Width Modulation (PWM) pins. PWM pins are used to control the speed of the motor. By changing the voltage signal’s polarity at its input we can rotate the motor in either clockwise or counter clockwise direction. Find more HERE!
GPS breakout board
The breakout is built around the MTK3339 chipset, a no-nonsense, high-quality GPS module that can track up to 22 satellites on 66 channels, has an excellent high-sensitivity receiver (-165 dB tracking!), and a built in antenna. It can do up to 10 location updates a second for high speed, high sensitivity logging or tracking. Power usage is incredibly low, only 20 mA during navigation. Find more HERE!
Ultrasonic Module.
The HC-SR04 ultrasonic sensor uses sonar to determine distance to an object like bats do. It offers excellent non-contact range detection with high accuracy and stable readings in an easy-to-use package.
From 2cm to 400 cm or 1” to 13 feet. Its operation is not affected by sunlight or black material like sharp rangefinders are (although acoustically soft materials like cloth can be difficult to detect). It comes complete with ultrasonic transmitter and receiver module. Find more HERE!
Arduino GSM Shield
The Arduino GSM Shield V2 connects your Arduino to the internet using the GPRS wireless network. Just plug this module onto your Arduino board, plug in a SIM card from an operator offering GPRS coverage and follow a few simple instructions to start controlling your world through the internet. You can also make/receive voice calls using the on-board audio/mic jack and send/receive SMS messages. Find more HERE!
Step 4: Architecture
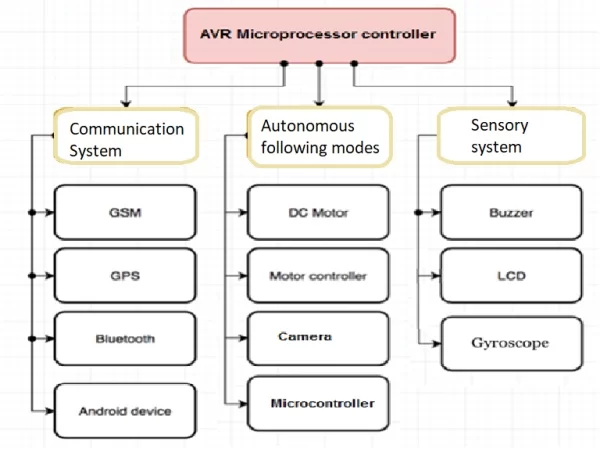
Subsystem 1: Wireless communication
Main functions:
GPRS Communication between bag and the user
GPS signal reception for the bag
Bluetooth connection between user and the bag
Hardware used:
GSM chip
GPS chip
HC 06 Bluetooth chip
Android device
Subsystem 2: User following autonomous mode
Main functions:
Follow the user autonomously
Detect of the bag falls down and make a notification
Receive image data using the camera
Detect the users legs
Move the bag according to the position of the user
Stop if he is very close to the user
Hardware used:
DC motor
DC motor controller
Ping transmitter
ping receivers
Camera and processor
Subsystem 3: Sensory sub system
Main functions:
Detect the orientation of the bag using an accelerometer
Play the buzzer in case the bag is lost
Display message in case the bag is lost
Hardware used:
Accelerometer
Buzzer
LCD
Step 5: Autonomous Mode Video
This video showing the ASS in the autonomous following mode
Step 6: Bluetooth Mode Video

This video showing the ASS in the Manual Mode
Step 7: Falling Detect Mode Video

This video showing the ASS in the Detect Mode
Step 8: The Android App

You Can download for the Google store HERE!
Step 9: Codes Sample!

GPS
#include
SoftwareSerial GPRS(7, 8); //7 = TX, 8 = RX
unsigned char buffer[64]; port
int count=0;
int i = 1; //if i = 0, send SMS.
void setup(){
//delay(10000);
GPRS.begin(19200); // the GPRS baud rate
Serial.begin(19200); // the Serial port of Arduino baud rate.
Serial.print(“I’m ready”);
Serial.print(“Hello?”);
}
void loop(){
if (GPRS.available()){ // if date is comming from softwareserial port ==> data is comming from gprs shield
while(GPRS.available()){ // reading data into char array
buffer[count++]=GPRS.read(); // writing data into array
if(count == 64)break;
}
Serial.write(buffer,count); // if no data transmission ends, write buffer to hardware serial port
clearBufferArray(); // call clearBufferArray function to clear the storaged data from the array
count = 0; // set counter of while loop to zero
}
if (Serial.available()) // if data is available on hardwareserial port ==> data is comming from PC or notebook
GPRS.write(Serial.read()); // write it to the GPRS shield
if(i == 0){
GPRS.print(“AT+CMGF=1\r”); //sending SMS in text mode
Serial.println(“AT+CMGF=1\r”);
delay(1000);
GPRS.print(“AT+CMGS=\”+554988063979\”\r”); // phone number
Serial.println(“AT+CMGS=\”+554988063979\”\r”);
delay(1000);
GPRS.print(“Test\r”); // message
Serial.println(“Test\r”);
delay(1000);
GPRS.write(0x1A); //send a Ctrl+Z(end of the message)
delay(1000);
Serial.println(“SMS sent successfully”);
i++;
}
}
void clearBufferArray(){ // function to clear buffer array
for (int i=0; i
buffer[i]=NULL; // clear all index of array with command NULL
}
}
Accelerometer
/*
ADXL3xx
Reads an Analog Devices ADXL3xx accelerometer and communicates the
acceleration to the computer. The pins used are designed to be easily
compatible with the breakout boards from SparkFun, available from:
http://www.sparkfun.com/commerce/categories.php?c…
The circuit:
– analog 0: accelerometer self test
– analog 1: z-axis
– analog 2: y-axis
– analog 3: x-axis
– analog 4: ground
– analog 5: vcc
created 2 Jul 2008
by David A. Mellis
modified 30 Aug 2011
by Tom Igoe
This example code is in the public domain.
http://www.arduino.cc/en/Tutorial/ADXL3xx
*/
// these constants describe the pins. They won’t change:
const int groundpin = 18; // analog input pin 4 — ground
const int powerpin = 19; // analog input pin 5 — voltage
const int xpin = A3; // x-axis of the accelerometer
const int ypin = A2; // y-axis
const int zpin = A1; // z-axis (only on 3-axis models)
void setup() {
// initialize the serial communications:
Serial.begin(9600);
// Provide ground and power by using the analog inputs as normal digital pins.
// This makes it possible to directly connect the breakout board to the
// Arduino. If you use the normal 5V and GND pins on the Arduino,
// you can remove these lines.
pinMode(groundpin, OUTPUT);
pinMode(powerpin, OUTPUT);
digitalWrite(groundpin, LOW);
digitalWrite(powerpin, HIGH);
}
void loop() {
// print the sensor values:
Serial.print(analogRead(xpin));
// print a tab between values:
Serial.print(“\t”);
Serial.print(analogRead(ypin));
// print a tab between values:
Serial.print(“\t”);
Serial.print(analogRead(zpin));
Serial.println();
// delay before next reading:
delay(100);
}
1.2 Motor
const int pwm = 2 ; //initializing pin 2 as pwm
const int in_1 = 8 ;
const int in_2 = 9 ;
//For providing logic to L298 IC to choose the direction of the DC motor
void setup() {
pinMode(pwm,OUTPUT) ; //we have to set PWM pin as output
pinMode(in_1,OUTPUT) ; //Logic pins are also set as output
pinMode(in_2,OUTPUT) ;
}
void loop() {
//For Clock wise motion , in_1 = High , in_2 = Low
digitalWrite(in_1,HIGH) ;
digitalWrite(in_2,LOW) ;
analogWrite(pwm,255) ;
/* setting pwm of the motor to 255 we can change the speed of rotation
by changing pwm input but we are only using arduino so we are using highest
value to driver the motor */
//Clockwise for 3 secs
delay(3000) ;
//For brake
digitalWrite(in_1,HIGH) ;
digitalWrite(in_2,HIGH) ;
delay(1000) ;
//For Anti Clock-wise motion – IN_1 = LOW , IN_2 = HIGH
digitalWrite(in_1,LOW) ;
digitalWrite(in_2,HIGH) ;
delay(3000) ;
//For brake
digitalWrite(in_1,HIGH) ;
digitalWrite(in_2,HIGH) ;
delay(1000) ;
}
Bluetooth
/*
* Bluetooh Basic: LED ON OFF – Avishkar
* Coder – Mayoogh Girish
* Website – http://bit.do/Avishkar
* Download the App : https://github.com/Mayoogh/Arduino-Bluetooth-Basi…
* This program lets you to control a LED on pin 13 of arduino using a bluetooth module
*/
char data = 0; //Variable for storing received data
void setup()
{
Serial.begin(9600); //Sets the baud for serial data transmission
pinMode(13, OUTPUT); //Sets digital pin 13 as output pin
}
void loop()
{
if(Serial.available() > 0) // Send data only when you receive data:
{
data = Serial.read(); //Read the incoming data & store into data
Serial.print(data); //Print Value inside data in Serial monitor
Serial.print(“\n”);
if(data == ‘1’) // Checks whether value of data is equal to 1
digitalWrite(13, HIGH); //If value is 1 then LED turns ON
else if(data == ‘0’) // Checks whether value of data is equal to 0
digitalWrite(13, LOW); //If value is 0 then LED turns OFF
}
}
Step 10: Codes for the GPS Tracker
/******************************************************************** * AltSoftSerial always uses these pins for Serial communication: * * * * Board Transmit Receive PWM Unusable * * —– ——– ——- ———— * * Teensy 3.0 & 3.1 21 20 22 * * Teensy 2.0 9 10 (none) * * Teensy++ 2.0 25 4 26, 27 * * Arduino Uno 9 8 10 * * Arduino Leonardo 5 13 (none) * * Arduino Mega 46 48 44, 45 * * Wiring-S 5 6 4 * * Sanguino 13 14 12 * *********************************************************************/ #include #include #include SoftwareSerial GPRS(2, 3); // RX, TX TinyGPSPlus gps; // The TinyGPS++ object for interfacing with the GPS AltSoftSerial ss; char c; void setup() { pinMode(12,OUTPUT); pinMode(7, OUTPUT); Power_gsm(); ss.begin(9600); // begin the GPS serial connection GPRS.begin(9600); // Start software serial delay(2000); GPRS.println(“AT+CMGF=1”); // AT+CMGF Select SMS Massage Format delay(100); GPRS.println(“AT+CNMI=1,2,0,0,0”); // AT+CNMI New SMS Massage INdication delay(100); GPRS.println(“AT+CMGD=1,4”); // AT+CMGD=1,4 Range of SMS on SIM card Can be deleted delay(1000); //SMSsend(“SYSTEM IS ON:)”);//2 GPRS.flush(); // deleting all massages at the first boot delay(100); } void loop() { while (ss.available() > 0) if (gps.encode(ss.read())) while (GPRS.available()) { delay(3); c = GPRS.read(); if (c == ‘D’) { if (GPRS.available()) { delay(3); c = GPRS.read(); if (c == ‘o’) { digitalWrite(12,HIGH); Senddata(); } else if (c == ‘c’) { digitalWrite(12, LOW); } } } } GPRS.flush(); } void Power_gsm() { digitalWrite(7, HIGH); delay(3000); digitalWrite(7, LOW); } void Senddata() { GPRS.print(“AT+CMGF=1\r”); // Carriage return delay(100); GPRS.println(“AT+CMGS=\”+966569634067\””); // replace x by your number (“AT+CMGS=\”+966xxxxxxxxx\””); to yours delay(100); // (+966) is the country code replace it with yours GPRS.print(“https://www.google.com/maps/place/”); GPRS.print(gps.location.lat(), 6); GPRS.print(“,”); GPRS.print(gps.location.lng(), 6); GPRS.println((char)26); GPRS.println(); delay(100); GPRS.println(“AT+CMGD=1,4”); // some AT Commands delay(100); GPRS.println(“AT+CMGF=1”); delay(100); GPRS.println(“AT+CNMI=1,2,0,0,0”); delay(200); }
Attachments
Step 11: The Hole Program
#include #include #include #include #include #include // SparkFun ADXL345 Library Pixy pixy; ADXL345 adxl = ADXL345(); // USE FOR I2C COMMUNICATION int buzzer = 8; int fstop = 0; int x_c; char serialchar = ‘ ‘; int h_c; int enA = 2;//black to blue int in1 = 3;//white int in2 = 4;//orange // motor two int dist1 = 0; int dist2 = 0; int dist3 = 0; int dist0 = 0; int s1 = 14; int s2 = 15; int enB = 9;//blue int in3 = 5;//yellow int in4 = 6;//green int bstop = 0; char recv; #define SONAR_NUM 1// Number or sensors.XXXXXCHANGED #define MAX_DISTANCE 500 // Max distance in cm. #define PING_INTERVAL 200 // Milliseconds between pings char recvc = ‘x’; //int front = 5; //int back = 6; //int left =2; //int right = 3; //unsigned long pingTimer[SONAR_NUM]; // When each pings. //unsigned int cm[SONAR_NUM]; // Store ping distances. int cm[SONAR_NUM]; // Store ping distances. uint8_t currentSensor = 0; // Which sensor is active. const int buttonPin = 40; const int button2Pin = 44; int buttonState = 0; int button2State = 0; int units = US_ROUNDTRIP_CM; char* unitText[] = {“cm”, “in”}; int diffU; int diffD; int diffL; int diffR; //SoftwareSerial bluetooth(2,3); NewPing sonar[SONAR_NUM] = { // Sensor object array. NewPing(46, 45, MAX_DISTANCE), }; void calc_dist() { delay(50); // Wait 50ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings. unsigned int uS0 = sonar[0].ping(); // Send ping, get ping time in microseconds (uS). dist0 = uS0 / US_ROUNDTRIP_CM; Serial.print(dist0); // Convert ping time to distance in cm and print result (0 = outside set distance range) Serial.println(“cm0”); //delay(250); } void ADXL_ISR() { // getInterruptSource clears all triggered actions after returning value // Do not call again until you need to recheck for triggered actions byte interrupts = adxl.getInterruptSource(); // Free Fall Detection if (adxl.triggered(interrupts, ADXL345_FREE_FALL)) { Serial.println(“*** FREE FALL ***”); //add code here to do when free fall is sensed } // Inactivity if (adxl.triggered(interrupts, ADXL345_INACTIVITY)) { Serial.println(“*** INACTIVITY ***”); //add code here to do when inactivity is sensed } // Activity if (adxl.triggered(interrupts, ADXL345_ACTIVITY)) { Serial.println(“*** ACTIVITY ***”); //add code here to do when activity is sensed } // Double Tap Detection if (adxl.triggered(interrupts, ADXL345_DOUBLE_TAP)) { Serial.println(“*** DOUBLE TAP ***”); //add code here to do when a 2X tap is sensed } // Tap Detection if (adxl.triggered(interrupts, ADXL345_SINGLE_TAP)) { Serial.println(“*** TAP ***”); //add code here to do when a tap is sensed } } void seeAcc() { int x, y, z; adxl.readAccel(&x, &y, &z); // Read the accelerometer values and store them in variables declared above x,y,z // Output Results to Serial /* UNCOMMENT TO VIEW X Y Z ACCELEROMETER VALUES */ Serial.print(x); Serial.print(“, “); Serial.print(y); Serial.print(“, “); Serial.println(z); if ((y < -5) || (y > 15) || (x < -35) || (x > -3)) { digitalWrite(buzzer, HIGH); } else { digitalWrite(buzzer, LOW); } ADXL_ISR(); } void stops() { // now turn off motors digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); } void left() { analogWrite(enA, 200); analogWrite(enB, 200); digitalWrite(in1, HIGH); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); } void right() { analogWrite(enA, 255); analogWrite(enB, 240); stops(); digitalWrite(in3, HIGH); digitalWrite(in4, LOW); digitalWrite(in1, LOW); digitalWrite(in2, HIGH); } void forward() { analogWrite(enA, 255); analogWrite(enB, 255); digitalWrite(in3, HIGH); digitalWrite(in4, LOW); digitalWrite(in1, HIGH); digitalWrite(in2, LOW); } void back() { digitalWrite(in1, LOW); digitalWrite(in2, HIGH); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); } void setup() { pixy.init(); adxl.powerOn(); // Power on the ADXL345 adxl.setRangeSetting(16); // Give the range settings // Accepted values are 2g, 4g, 8g or 16g // Higher Values = Wider Measurement Range // Lower Values = Greater Sensitivity adxl.setSpiBit(0); // Configure the device to be in 4 wire SPI mode when set to ‘0’ or 3 wire SPI mode when set to 1 // Default: Set to 1 // SPI pins on the ATMega328: 11, 12 and 13 as reference in SPI Library adxl.setActivityXYZ(1, 0, 0); // Set to activate movement detection in the axes “adxl.setActivityXYZ(X, Y, Z);” (1 == ON, 0 == OFF) adxl.setActivityThreshold(75); // 62.5mg per increment // Set activity // Inactivity thresholds (0-255) adxl.setInactivityXYZ(1, 0, 0); // Set to detect inactivity in all the axes “adxl.setInactivityXYZ(X, Y, Z);” (1 == ON, 0 == OFF) adxl.setInactivityThreshold(75); // 62.5mg per increment // Set inactivity // Inactivity thresholds (0-255) adxl.setTimeInactivity(10); // How many seconds of no activity is inactive? adxl.setTapDetectionOnXYZ(0, 0, 1); // Detect taps in the directions turned ON “adxl.setTapDetectionOnX(X, Y, Z);” (1 == ON, 0 == OFF) // Set values for what is considered a TAP and what is a DOUBLE TAP (0-255) adxl.setTapThreshold(50); // 62.5 mg per increment adxl.setTapDuration(15); // 625 μs per increment adxl.setDoubleTapLatency(80); // 1.25 ms per increment adxl.setDoubleTapWindow(200); // 1.25 ms per increment // Set values for what is considered FREE FALL (0-255) adxl.setFreeFallThreshold(7); // (5 – 9) recommended – 62.5mg per increment adxl.setFreeFallDuration(30); // (20 – 70) recommended – 5ms per increment // Setting all interupts to take place on INT1 pin //adxl.setImportantInterruptMapping(1, 1, 1, 1, 1); // Sets “adxl.setEveryInterruptMapping(single tap, double tap, free fall, activity, inactivity);” // Accepts only 1 or 2 values for pins INT1 and INT2. This chooses the pin on the ADXL345 to use for Interrupts. // This library may have a problem using INT2 pin. Default to INT1 pin. // Turn on Interrupts for each mode (1 == ON, 0 == OFF) adxl.InactivityINT(1); adxl.ActivityINT(1); adxl.FreeFallINT(1); adxl.doubleTapINT(1); adxl.singleTapINT(1); //attachInterrupt(digitalPinToInterrupt(interruptPin), ADXL_ISR, RISING); // Attach Interrupt pinMode(enB, OUTPUT); pinMode(s1, INPUT); pinMode(s2, INPUT); pinMode(buzzer, OUTPUT); pinMode(in1, OUTPUT); pinMode(in2, OUTPUT); pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); analogWrite(enA, 255); analogWrite(enB, 255); Serial.begin(9600); Serial3.begin(9600); } void loop() { //forward(); calc_dist(); { seeAcc(); detect(); //BLUETOOTH char a = Serial3.read(); if (a > 0) Serial.println(a); analogWrite(enA, 180); analogWrite(enB, 180); if (a == ‘a’) { forward(); delay(500); } else if (a == ‘e’) { back(); delay(200); } else if (a == ‘d’) { right(); delay(350); } else if (a == ‘b’) { left(); delay(350); } if (a == ‘c’) { stops(); } } } void detect() { static int i = 0; int j; uint16_t blocks; char buf[32]; // grab blocks! blocks = pixy.getBlocks(); // If there are detect blocks, print them! if (blocks) { i++; // do this (print) every 50 frames because printing every // frame would bog down the Arduino if (i % 5 == 0) { sprintf(buf, “Detected %d:\n”, blocks); // Serial.println(buf); for (j = 0; j < blocks; j++) { sprintf(buf, ” block %d: “, j); // Serial.println(buf); if (x_c > 225) { stops(); Serial.println(“right”); right(); delay(200); stops(); } if (x_c < 115) { stops(); Serial.println(“left”); left(); delay(200); stops(); } if (x_c > 115 && x_c < 225) { stops(); Serial.println(“front”); forward(); delay(300); stops(); } else { Serial.println(“stop”); stops(); } } } } }
Attachments
Step 12: Thank You

Source: Autonomous Smart Suitcase Pixy Camera!
- What is the maximum weight the suitcase can carry?
The maximum weight of luggage supported is 7 Kg. - How fast does the autonomous smart suitcase move?
The operating speed is 5 km/h. - How long does the battery last on a full charge?
The operating time on a full charge is 3 Hours. - Does the suitcase use image recognition to follow the user?
Yes, it uses a Pixy2 sensor for image recognition with a max distance of 2 m and stops at 20 cm. - Can the suitcase detect if it has fallen down?
Yes, it uses a 3 Axis Accelerometer Gyroscope to detect falls and trigger notifications. - How does the suitcase communicate its location when lost?
It uses the Arduino GSM Shield and Sim Card to send SMS messages containing GPS coordinates. - Is there a manual control option available?
Yes, users can control the bag manually using an Android device connected via Bluetooth. - What wireless technologies are integrated into the project?
The system integrates Bluetooth, GPRS, and GPS for communication and tracking.