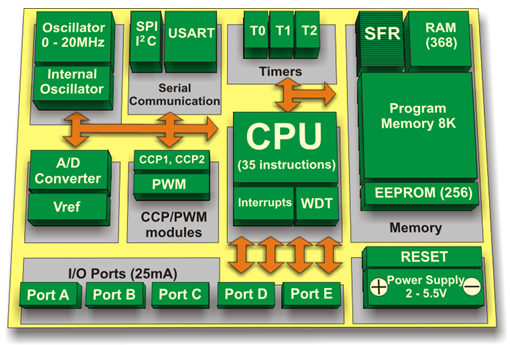
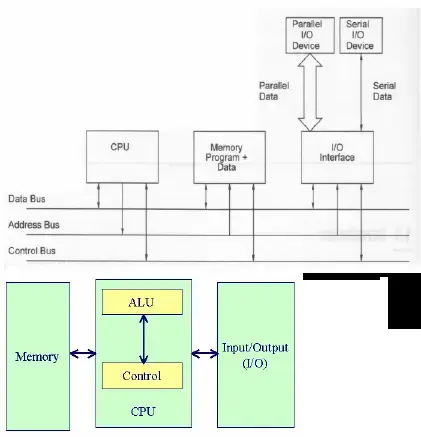
The Peripheral Interface Controller (PIC), developed by Microchip, stands out among microcontrollers for its speed and ease of implementation compared to alternatives like the 8051. Its programming simplicity and seamless interfacing with other peripherals have contributed to its success. A microcontroller, an integrated chip comprising RAM, ROM, CPU, timers, counters, etc., PIC shares these features […]