Motivation:
The echolocating bat is a wonderful animal that is unique in so many different ways: it is the only truly flying mammal, it can use air-coupled sonar to navigate in complete darkness while flying, it can allow its body temperature to drop to as low as 1degC (torpor) to save energy, and it has adapted to a huge range of climates and food sources (e.g., fruits, crawling and flying insects, nectar, fish, blood, etc). That’s nice, but why would a neuroscientist or engineer specifically study bats?

From a computational neuroscience perspective, bats are remarkable because of the very short timescale on which they operate. The barrage of returning sonar echoes from a bat’s near-environment lasts approximately 30 milliseconds following a sonar emission with the echo from a specific target lasting, at most, a few milliseconds. At this timescale, a particular neuron has the opportunity to fire only one or two spikes to represent the echo. Unlike the “traditional” view of cortical processing where many spikes are integrated over time to compute an average rate, the bat must rely on populations of neurons that respond transiently but selectively to different objects in the environment. In these neural circuits, the details of spike timing, synaptic dynamics, and neuron biophysics become extremely important. Flying at speeds anywhere from 1m/s to 6 m/s, a bat’s sensory world jumps from pulse to pulse as it flies through the world. Sensory prediction is therefore likely to be very important in this animal. In spite of all this behavioral specialization, the bat brain is organized like most other mammalian brains suggesting that echolocation arises from only small modifications of the typical mammalian auditory system.
From an engineering standpoint, biosonar systems (e.g. bats and dolphins) have inspired the design of very sophisticated sonar and radar systems that can map distant surfaces and track targets with great precision. Even with powerful mathematical tools and decades of experience, however, our best systems still do not rival the perceptual capabilities of dolphins. Many bats demonstrate incredible aerial agility, flying in complete darkness through branches and caves while hunting evasive insects. These animals perform such tasks in real-time with a total power consumption (including flight) measured in Watts, not hundreds of Watts. In addition to the ability to navigate in complete darkness by echolocation, both bats and dolphins live in very social environments using echolocation in group situations without any obvious problems with interference. All of these capabilities are highly desired by current military programs developing unmanned-aerial vehicles (UAV) especially since many of the target environments are in places where Global Positioning System (GPS) signals are unavailable and obstacle locations are not mapped.
Goal:
Our goal is to construct a flying bat-sized creature that uses ultrasonic echolocation to both navigate and scrutinize its environment sufficiently to distinguish between obstacles and “insects”. The bat’s sensory and motor system will be constructed from neural models and implemented using “neuromorphic” VLSI techniques. Our intention is two-fold: 1) to test these neural algorithms in a real-time, closed-loop behavioral situation, and 2) to develop useful sonar sensors for use in miniature aircraft systems.
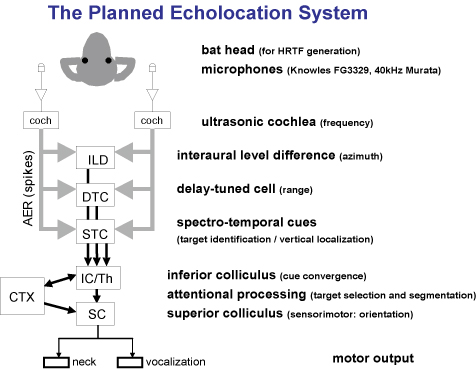
The Bat Head
We are working with two different hardware systems: a physically-larger single-frequency sonar system (“narrowband”) and a tiny broadband system. The narrowband system is being used to rapidly test concepts following initial software tests. Photos of these two systems are found below:
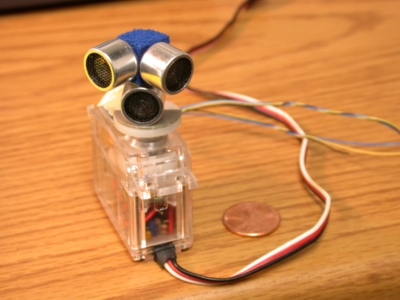
In the photo to the left, is our narrowband sonar system that operates only on a frequency of 40 kHz. The fixed arrangement of the microphones was chosen to produce a difference in echo amplitude with azimuthal direction. The current system roughly extracts direction and range and is capable of servoing the head (which is mounted on an model airplane servo) to track moving targets in real-time.
On the right, we have a photo of our broadband system using a baked polymer clay bat head with a tiny Knowles (FG3329) microphone soldered to the end of a group of wires. This system has two broadband ultrasonic (and audio) microphones that will feed our silicon cochleae chips.
Both of these physical heads produce intensity difference cues at each microphone that allows the system to determine the angle of the arriving echo.
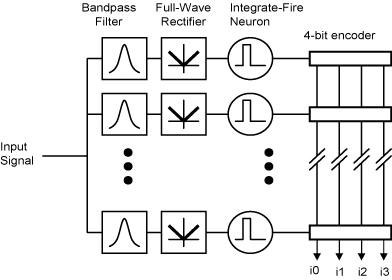
An Ultrasonic Cochlea
Echolocating bats specialize in high-frequency hearing using echolocation sounds that typically range in frequency from 20 kHz to 100 kHz. While some bats are specialized for specific frequencies with cochlear filtering at extremely high Q10dB values, we are studying bats that use a broadband vocalization and are ultrasonic frequency generalists (e.g., Myotis lucifugus) with Q10dB values in the range of 10 to 30. Good frequency resolution is important for vertical localization, discriminating close objects, as well as for prey discrimination.
To support our ongoing work in modeling bat echolocation, a binaural, ultrasonic cochlea-like filter bank has been designed with moderate quality (Q) factor (as high as 65) with spiking neurons that are driven by the filter outputs. The neuron addresses are reported off chip at the time of the spike in an unarbitrated fashion and in current-mode to reduce the amount of capacitively-coupled feedback into the filters. This chip was fabricated in a commercially-available 0.5 um CMOS process and consumes 0.425 milliwatts at 5 volts.
Modeling the lateral superior olive (LSO), dorsal nucleus of the lateral lemniscus (DNLL), and the inferior colliculus (IC)
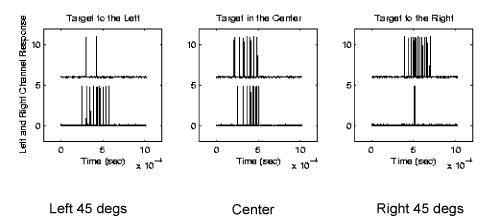
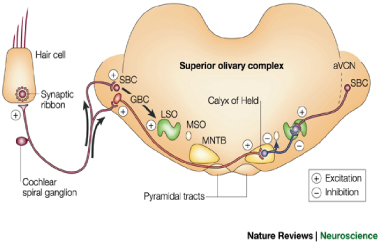
When echoes arrive from different directions, the number of spikes generated in the auditory nerve and the cochlear nucleus varies with the intensity at each ear. Using this information, the first binaural nucleus in the mammalian auditory system, the lateral superior olive (or LSO) becomes selective to the direction of arrival. These cells are excited by the intensity from one ear and inhibited by the intensity from the other ear.
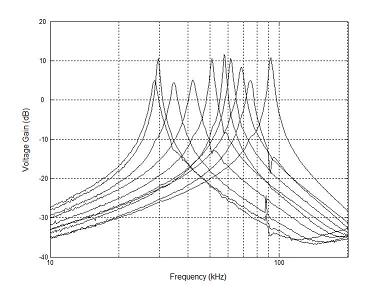
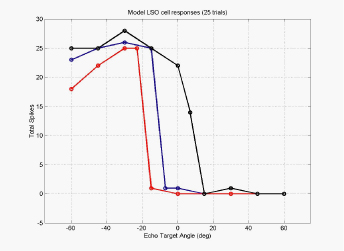
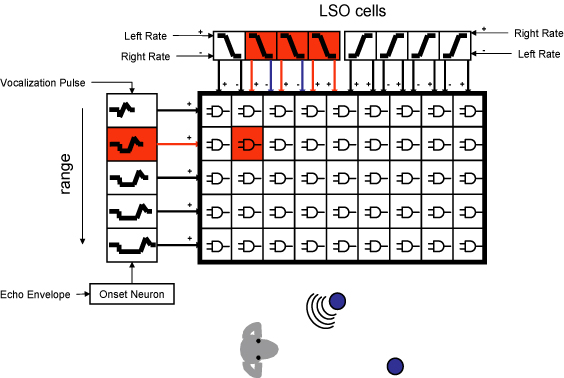
The binaural LSO response and the monaural response from the cochlear nucleus is projected to the inferior colliculus (IC) via the doral nucleus of the lateral lemniscus (or DNLL), resulting in very similar responses in both DNLL and IC. With similar responses in the LSO as in the IC, one can ask the question, “what kind of computation is going on here?” In the figure to the left is a set of tuning curves for three LSO cells that have different synaptic weightings from the left and right ears. By comparing the responses of the population of LSO cells, each of which have different synaptic weightings, we can determine which direction an echo is arriving from.
In this work, we are working with a single frequency system (40kHz) and brief burst of ultrasonic energy. Here we have designed a VLSI circuit that mimics the spiking neurons of the LSO, DNLL, and IC to create the responses seen in the bat brainstem neurons.Our experimentation with the circuits and model seem to suggest that the extra synaptic interaction at the level of the DNLL and the IC creates an temporal interaction between individual echoes resulting from a single vocalization and even interactions between echoes from previous vocalizations.
We have built a multi-layer neuron chip that can simulate the LSO, DNLL, and the IC using spiking neurons. With this chip, we are exploring the role of long-lasting inhibition and refractory periods on how the spatial receptive fields of bat brainstem neurons change when multiple echoes are presented to the animal. This is a largely unexplored area of research and where there have been experiments, they show results that suggest that bats may need a more sophisticated signal processing system to untangle all of the interactions.
Delay-tuned Cells (Range tuning)
Information about target range has many uses for bats during both prey-capture and navigation tasks. Beyond the extraction of distance and velocity, it may be important for less obvious tasks, such as optimizing the parameters of the echolocation process. For example, as a bat approaches a target, it alters the repetition rate, duration, spectral content, and amplitude of its vocalizations. Not only is echolocation used for insect capture, it provides to the bat information about obstacles, roosts, altitude, and other flying creatures.
In the bat’s brainstem and midbrain exist neural circuits that are sensitive to the specific difference in time between the outgoing sonar vocalization and the returning echo. While some of the details of the neural mechanisms are known to be species-specific, a basic model of re-afference-triggered, post-inhibitory rebound timing is reasonably well supported by available data.
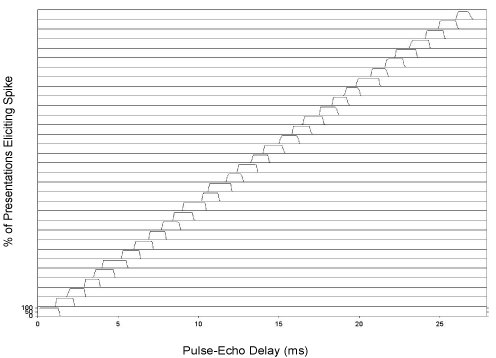
Neurons have been found in bats that show a ‘facilitated’ response to paired sounds (a simulated vocalization and an echo) presented at particular delays. The cells’ responses to sounds presented at the appropriate delays are much greater than the sum of the responses to the individual sounds presented alone. These cells are part of a larger class of neurons called ‘combination-sensitive’ neurons, and are specifically referred to as delay-tuned cells. Delay-tuned cells are found at manylevels in the bat auditory system. They have been found in the inferior colliculus (IC), the medial geniculate body (MGB), and the auditory cortex. Disruption of cortical delay-tuned cells has been shown to impair a bat’s ability to discriminate artificial pulse-echo pair delays. It is likely that delay-tuned neurons play a role in forming the bat’s perception of range, although delay-tuned cells have also been shown to respond to the social calls of other bats.
We have designed low-power, analog VLSI circuits to mimic this mechanism and have demonstrated range-dependent outputs for use in a real-time sonar system. These circuits are being used to implement range-dependent: vocalization amplitude, vocalization rate, and closest target isolation. Power consumption is approximately 2-4 mW.
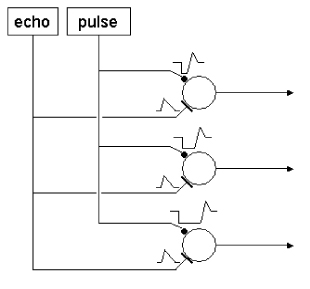
A Convergence of Range and Azimuth ( 2-D cells )
In our latest project, we have combined the work on LSO modeling which extracts information about azimuth and combined it with the range tuning cells above to create “2-D cells” which respond to a combination of range and azimuth. These circuits are coincidence detectors that respond to echoes originating from a particular direction and range.
Source: The Microchipoptera Project