Summary of Temperature-to-period circuit provides linearization of thermistor response
This article describes a circuit that linearizes the response of a thermistor, producing an output period proportional to temperature with less than 0.1K nonlinearity error over a 30K range. By paralleling a resistor with the thermistor and using a JFET current regulator, the circuit converts temperature into a digital-friendly frequency signal via an RC oscillator and comparator.
Parts used in the Thermistor Linearization Circuit:
- Thermistor (RT)
- Parallel Resistance (RP)
- JFET (Q1)
- Resistor RS
- Buffer-amplifier IC1
- Resistor R4
- Resistor R1
- Capacitor C1
- Resistor R2
- Comparator IC2
Designers often use thermistors rather than other temperature sensors because thermistors offer high sensitivity, compactness, low cost, and small time constants. But most thermistors’ resistance-versus-temperature characteristics are highly nonlinear and need correction for applications that require a linear response. Using a thermistor as a sensor, the simple circuit in Figure 1 provides a time period varying linearly with temperature with a nonlinearity error of less than 0.1K over a range as high as 30K. You can use a frequency counter to convert the period into a digital output. An approximation derived from Bosson’s Law for thermistor resistance, RT, as a function of temperature, θ, comprises RT=AB–θ (see sidebar “Exploring Bosson’s Law and its equation”). This relationship closely represents an actual thermistor’s behavior over a narrow temperature range.
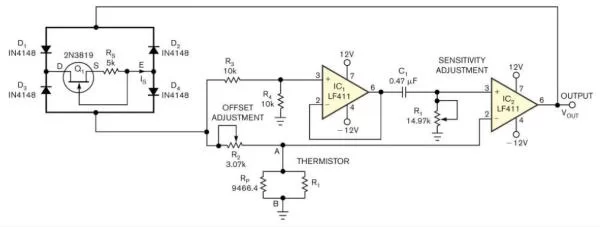
Figure 1
This simple circuit linearizes a thermistor’s response and produces an output period that’s proportional to temperature.
You can connect a parallel resistance, RP, of appropriate value across the thermistor and obtain an effective resistance that tracks fairly close to AB–θ ![]() 30K. In Figure 1, the network connected between terminals A and B provides an effective resistance of RAB
30K. In Figure 1, the network connected between terminals A and B provides an effective resistance of RAB ![]() AB–θ. JFET Q1 and resistance RS form a current regulator that supplies a constant current sink, IS, between terminals D and E.
AB–θ. JFET Q1 and resistance RS form a current regulator that supplies a constant current sink, IS, between terminals D and E.
Through buffer-amplifier IC1, the voltage across R4 excites the RC circuit comprising R1 and C1 in series, producing an exponentially decaying voltage across R1 when R2 is greater than RAB. At the instant when the decaying voltage across R1 falls below the voltage across thermistor RT, the output of comparator IC2changes its state. The circuit oscillates, producing the voltage waveforms in Figure 2 at IC2‘s output. The period of oscillation, T, is T=2R1C1ln(R2/RAB)![]() 2R1C1[ln(R2/A)+θlnB]. This equation indicates that T varies linearly with thermistor temperature θ.
2R1C1[ln(R2/A)+θlnB]. This equation indicates that T varies linearly with thermistor temperature θ.
Read more: Temperature-to-period circuit provides linearization of thermistor response
- Why do designers prefer thermistors?
Designers use them for high sensitivity, compactness, low cost, and small time constants. - How does the circuit handle nonlinear resistance?
A parallel resistance is connected across the thermistor to create an effective resistance tracking AB–θ. - What component forms the constant current sink?
JFET Q1 and resistance RS form a current regulator supplying constant current IS between terminals D and E. - What triggers the state change in comparator IC2?
The decaying voltage across R1 falls below the voltage across thermistor RT. - Does the oscillation period vary linearly with temperature?
Yes, the equation indicates the period T varies linearly with thermistor temperature θ. - What is the maximum nonlinearity error mentioned?
The circuit has a nonlinearity error of less than 0.1K over a range as high as 30K. - Can the output be converted to digital?
Yes, you can use a frequency counter to convert the period into a digital output. - Which law approximates the thermistor resistance relationship?
Bosson's Law provides the approximation RT=AB–θ for thermistor resistance as a function of temperature.