Summary of Obstacle Sensing Walking Stick for Visually Impaired Persons : Block Diagram
This project is an obstacle-sensing walking stick for visually impaired individuals, utilizing a mobile power bank, ultrasonic sensors, a microcontroller, and an alert system. The device detects obstacles at varying distances and provides audio or vibrational feedback to guide the user safely.
Parts used in the Obstacle Sensing Walking Stick:
- Rechargeable 5V Power Bank (2700mAH)
- HC-SR04 Ultrasonic Range Finder Module
- PIC16F877A Microcontroller
- 10mm Diameter 5 Volt Buzzer
- Vibrator Motor (Optional)
From the block diagram given above you can see that this project has four major parts.
The Power Bank
Finding a good power source for this project was a challenge, the power supply should have to be mobile, so that we cannot use power adapters. Also it had to be rechargeable so that it is economical for day long use to. And last but not the least! It had to be low cost. So we picked up a rechargeable 5v power bank used to charge mobile phones or tablets. Due to mass production and high demand as a mobile accessory these are dirt cheap! A common 2700mAH power bank with USB type socket is shown below.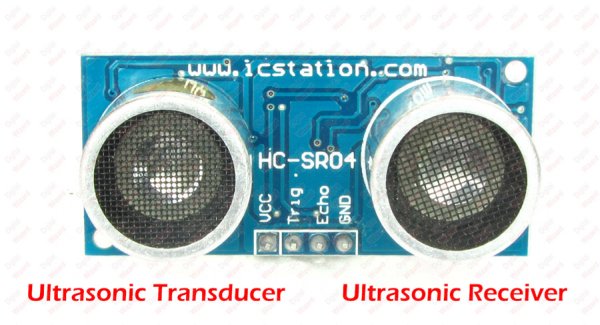
These can be charged in 2hours using a 5v charger. The charger is plugged into the wall socket and 5v output from the charger is given to the power bank and allowed to charge for 2 hours. The power bank must be detached from the project while charging.
Ultrasonic Range Finders
These are used to measure the distance to the obstacle. They emit sound waves with their frequency lying in the ultrasonic spectrum (more than 20Kz) and thus inaudible to human ears. These sound waves goes to the obstacle and bounces back to the detectors. We use a common HC-SR04 rangefinder module for this purpose.
PIC Microcontroller
This is the heart of the project. It reads distance to obstacle using the sensor and also commands the buzzer. There are several member in the PIC MCU family, but we have chosen PIC16F877A because it is very popular, easily available and is recommended in the academic course of many universities of Bharat.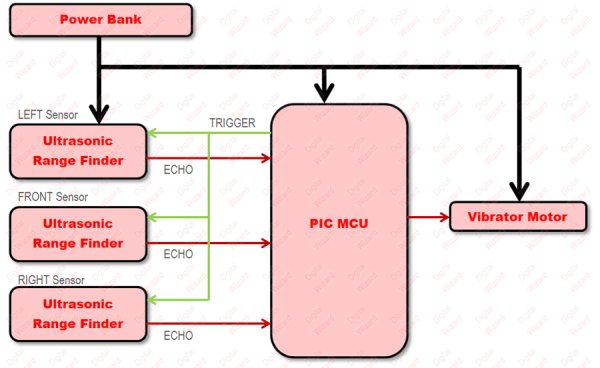
Buzzer
A small 10mm diameter 5 volt buzzer is used to alert the user about the obstacles. It beeps once for a obstacle in left, twice for a obstacle in front and thrice for an obstacle in right. You can also connect a vibrator motor in parallel with the buzzer. This will provide a vibrational feedback along with audio beeps.
For more detail: Obstacle Sensing Walking Stick for Visually Impaired Persons : Block Diagram
- What type of power source was selected for this project?
A rechargeable 5V power bank used for mobile phones or tablets. - How long does it take to charge the power bank?
The power bank requires 2 hours to charge using a 5V charger. - Can the power bank remain connected while charging?
No, the power bank must be detached from the project while charging. - Which ultrasonic module is used to measure distance?
A common HC-SR04 rangefinder module is used. - Why was the PIC16F877A microcontroller chosen?
It was chosen because it is popular, easily available, and recommended in academic courses. - How does the buzzer indicate different obstacle locations?
It beeps once for a left obstacle, twice for front, and thrice for right. - Can a vibrator motor be added to the system?
Yes, a vibrator motor can be connected in parallel with the buzzer.