Summary of How To Use PIC Microcontroller For Voice Input And Output
Microcontrollers can handle analog audio by sampling via ADC and reproducing via PWM. This project uses a PIC18F4550 (10-bit ADC, 13 inputs, 4 PWM outputs) with a microphone, amplifier, positive clamper, voltage divider, and timer0-driven sampling to capture, condition, digitize, and output voice signals. Timer interrupts trigger ADC sampling and PWM duty updates. External circuitry and firmware together enable voice input and output using ADC, PWM, and timers.
Parts used in the PIC Microcontroller For Voice Input And Output:
- PIC18F4550 microcontroller
- Condenser microphone
- Pull-up resistor for microphone
- Coupling capacitor
- NPN transistor amplifier
- Germanium diode positive clamper
- Variable resistor voltage divider
- Timer0 module (on-chip)
- ADC module (on-chip, 10-bit)
- PWM module (on-chip, 4 channels)
- Oscilloscope/CRO for signal observation
- LCD display and interface connections (PORTB, PORTD)
Microcontrollers are purely digital devices which work on logic0 and logic1 voltages; still they are widely used for analog signal processing. There are specialized signal processors chips available which are custom made for particular applications; however a general purpose microcontroller is more than enough for small kind of signal processing applications like audio signal input and output. The microcontroller can read the analog input voltage by sampling it and converting it to their digital values. The Analog to Digital Converter (ADC) available in almost all the microcontrollers help in this task. A timer can be used to generate the sampling time period. The sampled values can then read and modify by the microcontroller. The modified signal is then output by the microcontroller in the form of Pulse Width Modulated (PWM) waves. Most of the microcontrollers have the PWM module which helps them in generating analog voltage output at an external device.
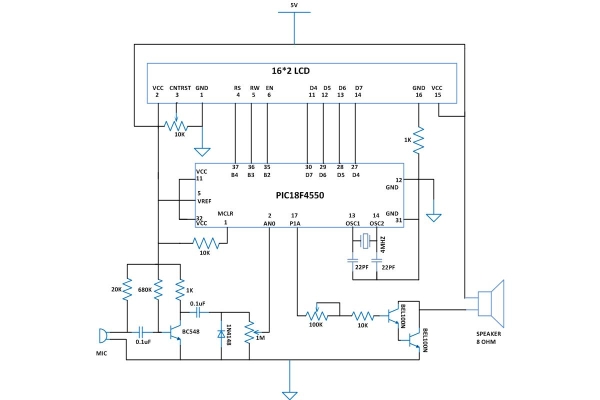
The PIC18F4550 has a built-in 10bit ADC, which is provided with a13 input channels. It has a PWM module with four output channels. In this particular project the ADC, PWM modules are used along with the timer0 modules and the method of using those modules are already discussed in previous projects. This project is actually an application which makes use of the above mentioned modules. Both the coding and the external circuitry have equal importance in this project.
VOICE INPUT
The voice input block has a microphone which captures the voice signals from the surroundings. The voice signals are then amplified to a certain level using a small amplifier circuit. The amplified signal may have both positive and negative cycles. Since the ADC of the microcontroller can read only the positive voltages, the signal output from the amplifier should be clamped above the zero voltage level so that the ADC can read the complete cycle.
Hence the VOICE INPUT block is designed to capture the voice signals and modify them in such a way that the ADC of the microcontroller can read them. The following figure shows the different sub blocks inside the AUDIO INPUT block which helps to capture and modify the audio signals.
MICROPHONE CIRCUIT
The microphone used in this project is the commonly available condenser microphone. The microphone is pulled up using a resistor. The voice in the environment causes the capacitor plates of the condenser microphone to vibrate and hence the variation of capacitance occurs. This causes current to flow in an out of the condenser microphone according to the voice signal. The current flow produces voltage drop across the resistor which can then couple out using another capacitor.
The following image is the signal captured using CRO at the output of MICROPHONE CIRCUIT. The Volts/Division of the CRO has been set to 0.05V
AMPLIFIER
The voltage signal coming from the MICROPHONE CIRCUIT is very small and hence these cannot be read by the microcontroller. Before fed this signal to the microcontroller it should be amplified. In this project a NPN transistor is used to amplify the voice signals to a particular level so that the ADC will be able to read it. Another advantage of using the amplifier is that it somewhat reduces the noise which forms along with the voice signal at the MICROPHONE CIRCUIT.
POSITIVE CLAMPER
The positive clamper is very important in this project since the ADC can read only the positive voltages and the amplified voice signals from the AMPLIFIER will be having both positive and negative cycles. The entire signal should be clamped to the positive voltage level without any distortion so that the ADC can read both the cycles. A germanium diode clamper is used in this project which can clamp the signal above a positive voltage which is equivalent to its forward bias voltage.
The following image is the signal captured using CRO at the output of POSITIVE CLAMPER. The Volts/Division of the CRO has been set to 1V
VOLTAGE DIVIDER
The amplified signal could be sometimes larger than which the ADC can convert completely. For all the signal voltages above the ADC reference voltage the ADC will produce its maximum value only. The values which are read by the ADC are directly used to modify the pulse width of the PWM wave. Since the maximum pulse width in a PWM cycle is also limited the voltage level that is produced by the AMPLIFIER should be kept in a suitable range. The voltage divider block which consists of a variable resistor connected across the POSITIVE CLAMPER will help to keep the voltage level in a range which the ADC can read and also the pulse width of a PWM wave can represent.
TIMER
The timer module is used to generate period interrupts at a very high frequency which is well above the frequency of the audio signals. Each time the interrupt fires the value captured by the ADC is read which can be called as the sampled value of the signal at that particular instant. Thus the timer act as the sampling period generating block which samples the audio signal captured by the microphone.
The input signals should be sampled at least double the input frequency, and then only it will be possible to reconstruct the same signal. As the sampling frequency increases the number of samples increases and the reconstructed signal resembles more to the original signal. The audio signals normally fall in a frequency range from 500Hz to 5 KHz and hence the sampling frequency should be well above that frequency.
Using the timer0 module to generate sampling time is explained in a previous project on Sine wave generation using PWM module of the PIC.
For more detail: How To Use PIC Microcontroller For Voice Input And Output
- How does the microcontroller read analog voice signals?
The microcontroller samples the conditioned analog voltage using its built-in ADC when timer-driven interrupts occur. - Can the ADC read negative portions of the microphone signal?
No. The signal is clamped above zero using a positive clamper so the ADC can read the full cycle. - What component amplifies the microphone signal?
An NPN transistor amplifier is used to boost the microphone output to ADC-readable levels. - Why is a voltage divider used after the clamper?
To keep the amplified signal within the ADC reference range and the PWM representable pulse width range. - How is the sampling period generated?
Timer0 is used to generate high-frequency interrupts that define the sampling period. - What is the ADC specification on the PIC18F4550 used?
The PIC18F4550 has a built-in 10-bit ADC with 13 input channels. - How are sampled values output as analog voltage?
Sampled digital values are used to modulate PWM pulse width which produces an analog-equivalent output externally. - What purpose does the positive clamper diode serve?
The germanium diode clamper shifts the amplified signal above a positive voltage so the ADC can read both cycles without distortion.