Summary of Brushless Motor Control Made Easy using PIC16F877 with Proteus Simulation
Brushless DC motor control using a PIC16F877 is demonstrated via sensor-based commutation and PWM speed/offset control, implemented and tested entirely in Proteus VSM. The MPASM firmware reads three rotor position sensors to sequence three-phase outputs, enabling realistic simulation of BLDC behavior for learning and prototyping based on AN857.
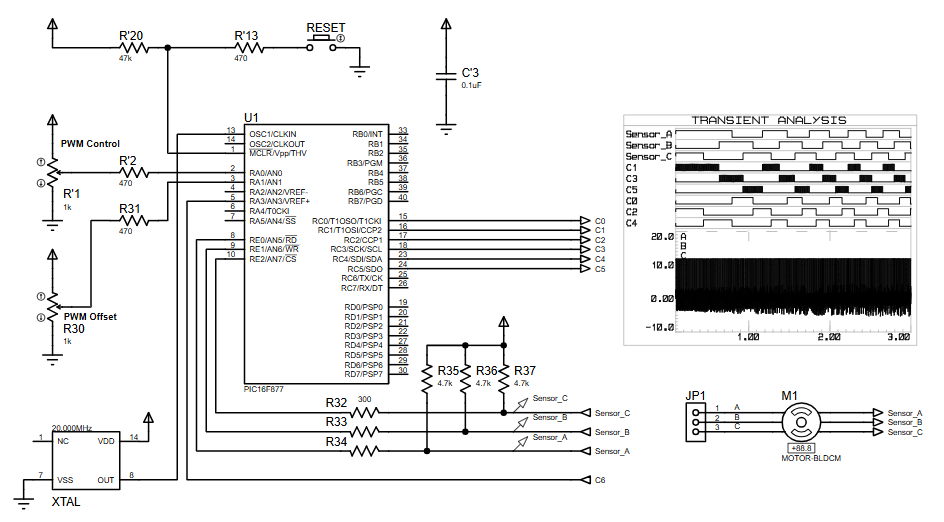
Parts used in the Brushless Motor Control Made Easy using PIC16F877 with Proteus Simulation:
- PIC16F877 microcontroller
- Brushless DC motor (BLDC)
- Rotor position sensors (A, B, C)
- PWM control potentiometers
- Crystal oscillator
- Resistors
- Capacitors
- Reset circuitry
- Power supply connections
- Can this project run entirely in Proteus?
Yes, the design is specifically intended for Proteus simulation using VSM. - Which microcontroller is used?
The project uses the PIC16F877 from the PIC16 family. - Is this sensor-based or sensorless control?
This is a sensor-based BLDC motor control project. - What compiler is required?
The firmware is written using MPASM. - Can PWM values be modified?
Yes, PWM control and offset inputs allow adjustment. - Is this suitable for beginners?
Yes, it is ideal for learning motor control fundamentals. - Can the design be extended to hardware?
Yes, the simulation can be adapted to real hardware with appropriate drivers. - What is the main learning focus?
Understanding BLDC commutation, PWM control, and embedded motor logic.