The infrared (IR) is invisible radiant energy, electromagnetic radiation that we cannot see with our eyes, but we can sometimes feel on our skin as heat. The infrared light falls just outside the visible spectrum, beyond the edge of what we can see as red. Most of the thermal radiation emitted by objects near room temperature is infrared.
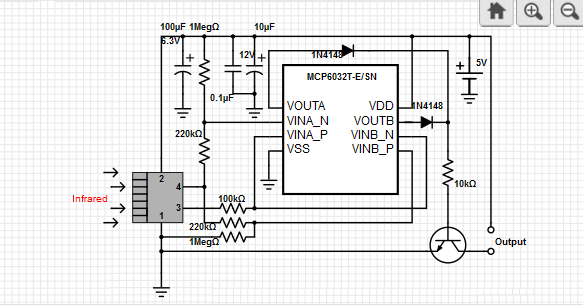
The circuit uses a MCP6032 microchip operational amplifier. The MCP6032 operational amplifier (op amp) has a gain bandwidth of 10kHz with a low typical operating current of 900nA and an offset voltage that is less than 150uV. The MCP6032 uses Microchip’s advanced CMOS technology, which provides low bias current, high-speed operation, high open-loop gain and rail-to-rail input and output swing. The MCP6032 operates with a single supply voltage that can be as low as 1.8V, while drawing less than 1uA of quiescent current. The MCP6032 is available in standard 8-lead SOIC and MSOP packages. It also includes, a PID20 integrated circuit and a few electronic components. The size of the output signal of PID20 is determined by the task at pins 3 and 4. The output signal at pin 3 is compared with a reference voltage equal to half the supply voltage. The reference voltage is taken from the voltage divider R2-R3-R4-R5. When approaching an object warmer than the surrounding environment, or to remove an object colder than the environment, the output voltage increases. The variation of the sensor output will be compared, the IC2a and IC2b, located voltage of 0.5V under and over voltage reference respectively. Depending on the output, one of the comparators calculates and activates T1.
This basic circuit is used in night-vision devices with infrared illumination, which allows people or animals to be observed without the observer being detected. The infrared light is also used in industrial, scientific, and medical applications as well as in consumer devices.
For more detail: Passive Infrared Detector Circuit