Summary of SUMO ROBOT PROJECT PIC16F877 CONTROL CIRCUIT L293D
Mini sumo robot uses a PIC16F877 microcontroller, L293D motor driver, and C-written firmware; it’s compact, sensor-equipped, battery-powered, and optimized for ring-pushing performance in sumo contests.
Parts used in the Mini sumo robot:
- PIC16F877-20/SP microcontroller
- 16 MHz crystal
- L293D motor driver chip
- Two Lego 350 RPM 9V gear motors
- Two 30.4 mm Lego tires
- Stainless steel wheels
- Lego motor shafts and driver hardware
- Two reflective infrared edge-detection sensors (active IR)
- Two 9V alkaline batteries (power supply)
- Connection/interface for Linx TXM-418-RM external transmitter (418 MHz, 9600 baud)
- PCB/control circuit components for motor control and telemetry
Mini sumo robot design is very stylish robot pic16f877 microcontroller used in motor driver for the l293d kullanılmş software crafted with the C language. Mini densede very detailed all of the resources that are...Electronics Projects, Sumo Robot Project PIC16F877 Control Circuit L293D “microchip projects, microcontroller projects, pic16f877 projects, “
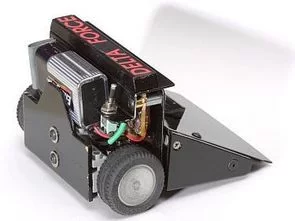
Mini sumo robot design is very stylish robot pic16f877 microcontroller used in motor driver for the l293d kullanılmş software crafted with the C language. Mini densede very detailed all of the resources that are shared with a Sumo robot project also robot contest opponents out of the runway:)
| SUMO-ROBOT-features | |
|---|---|
| Size | 9.9cm(W) x 9.9cm(L) x 6.8cm(H) |
| weight | 498 gr |
| Microcontroller MCU | PIC16F877-20/SP with 16 MHZ Crystal 8K ROM 368 Byte RAM |
| Programming Language |
C |
| Motor | 2 Lego 350 RPM 9 volt gear motor |
| Motor driver chip |
L293D |
| Speed control | Software-PRM (Pulse Rate of Modulator) EMF feedback |
| tires | 2 pcs 30.4 mm Lego tires |
| wheels | Made of stainless steel wheels |
| Driver systems | Lego motor ve shaft |
| Speed | 36 cm/sec |
| Power | 450 grams (wheels spinning) |
| Power supply | 2 pcs. 9v alkaline batteries |
| Motor current | 60mA crusing, 400 mA pushing |
| Sensors | Two reflective infrared sensor for the detection of edges active IR |
| Tele-metri | Connection for external transmitter Linx TXM-418-RM (9600 baud 418 MHZ) |
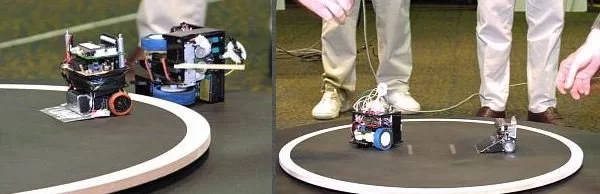
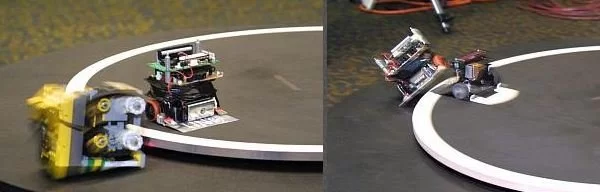
ROBOT PROJECT TESTS



Source: SUMO ROBOT PROJECT PIC16F877 CONTROL CIRCUIT L293D Alternatif linlk: sumo-robot-project-pic16f877-control-circuit-l293d.RAR
- What microcontroller is used in the Mini sumo robot?
The robot uses a PIC16F877-20/SP microcontroller with a 16 MHz crystal. - What motor driver chip does the project use?
The project uses an L293D motor driver chip. - What motors and wheels are used?
Two Lego 350 RPM 9 volt gear motors with 30.4 mm Lego tires and stainless steel wheels are used. - What programming language is used for the robot software?
The software is written in the C programming language. - How is speed controlled in the robot?
Speed control is implemented in software using PRM (Pulse Rate of Modulator) with EMF feedback. - What sensors detect the ring edges?
The robot uses two reflective infrared active IR sensors for edge detection. - What power supply does the robot use?
Power is supplied by two 9V alkaline batteries. - What telemetry option is available?
There is a connection for an external transmitter, specifically Linx TXM-418-RM at 418 MHz and 9600 baud. - What are the robot size and weight?
The robot measures 9.9 cm by 9.9 cm by 6.8 cm and weighs 498 grams. - What is the robot top speed and motor current draw?
The robot speed is 36 cm/sec; motor current is about 60 mA cruising and 400 mA when pushing.