LINE FOLLOWING ROBOT CIRCUIT PIC12F508 MC68HC908QB8
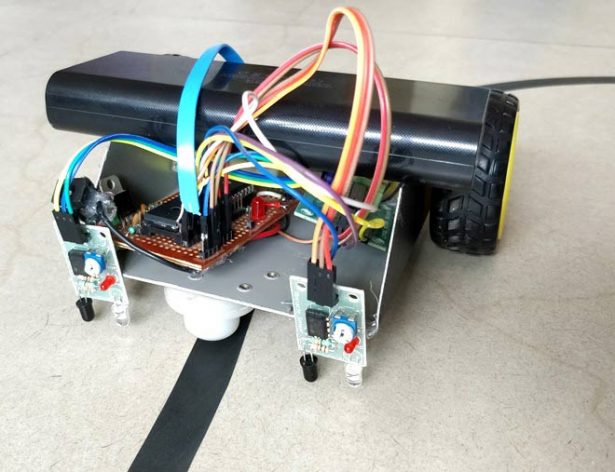
Line following robot project, control of MC68HC908QB8 and PIC12F508 microcontrollers. Motor drive circuit used the L298. The system is complicated and cumbersome, but there’s a different robot projects useful sections PIC12F508-American SFH506-36 IR receiver… Electronics Projects, Line Following Robot Circuit PIC12F508 MC68HC908QB8 “microchip projects, microcontroller projects, “ Line following robot project, control of MC68HC908QB8 and PIC12F508 microcontrollers. Motor drive circuit […]
LINE FOLLOWING ROBOT CIRCUIT PIC12F508 MC68HC908QB8 Read More »