Summary of Discolight effect with bass beat control using PIC16F84A
This project creates a discolight system where a motor rotates light beams in sync with music bass beats. A PIC16F84A microcontroller processes audio via a microphone, triggering full or half-step motor rotation based on beat detection and randomization. The system includes adjustable settings for speed and duration stored in EEPROM, with safeguards against echo-induced multi-triggering.
Parts used in the Discolight effect with bass beat control using PIC16F84A:
- PIC16F84A microcontroller
- Motor (driven by external circuit)
- Microphone (replaces line-out control)
- Pushbuttons (for manual control and bypassing beats)
- Trimers (for sensitivity adjustment)
- Lens
- Lamp
- Parabola reflector
- Eagle CAD software (CADsoft)
- Ic-Prog programming tool
- JDM programmer
- EEPROM (for saving settings)
Short description of the operation:
External circuit converts bass beat of music into pulses. The motor is controlled by them. If theres bass beat recognised then the motor rotates one direction (in full stepping) for a predefined time then stops. If the second beat comes in then it rotates again for the same time and so on. There is a random number generator (from 1 to 4) written into the code which tells how many times have the motor to rotate one direction. After that the PIC changes rotation direction of the motor. If the tempo is too fast (<400msec) then the direction is changed immediately. When the motor stops after the predefined time period a counter is enabled. If beat doesnt come in for 15sec the motor starts to rotate slowly in half stepping. If a beat comes in the counter is disabled and the motor continues its normal rotation in full stepping. (Half stepping is smoother but unfortunately the torque is less)
The PIC can control the motor after every beat or its possible to bypass some beats. It can be done by pushbuttons. Rotation speed and rotation length can be adjusted too. Settings are limited between values to prevent possible register overflow-underflow. These values are saved in EEPROM so after shut-down the settings dont lost.
A beat consist of a series of vibrations (dont know the correct English word for that-sorry) so the PIC gets a few interrupts. To prevent multi-triggering theres a counter written into the code which disables reaction to beat for 200msecs after the first interrupt. 180msec delay is enough if you are using amplifiers output (or line out) as music source. I had to increase it to 200msec because i use microphone and the rooms echo influences operation.
Programming the PIC16F84A
When programming the PIC16F84A you need to fill the first three EEPROM locations with the setting values.
I used these one: 01 14 E0
After you successfully built the whole hardware you need to adjust the trimmers very precisely. If you dont experiment a few times with adjusting them then its possible that the PIC will not recognise every beat because of the small amplification level. Or, it will do several things at only one beat. So you have to find the best adjustment.
Code
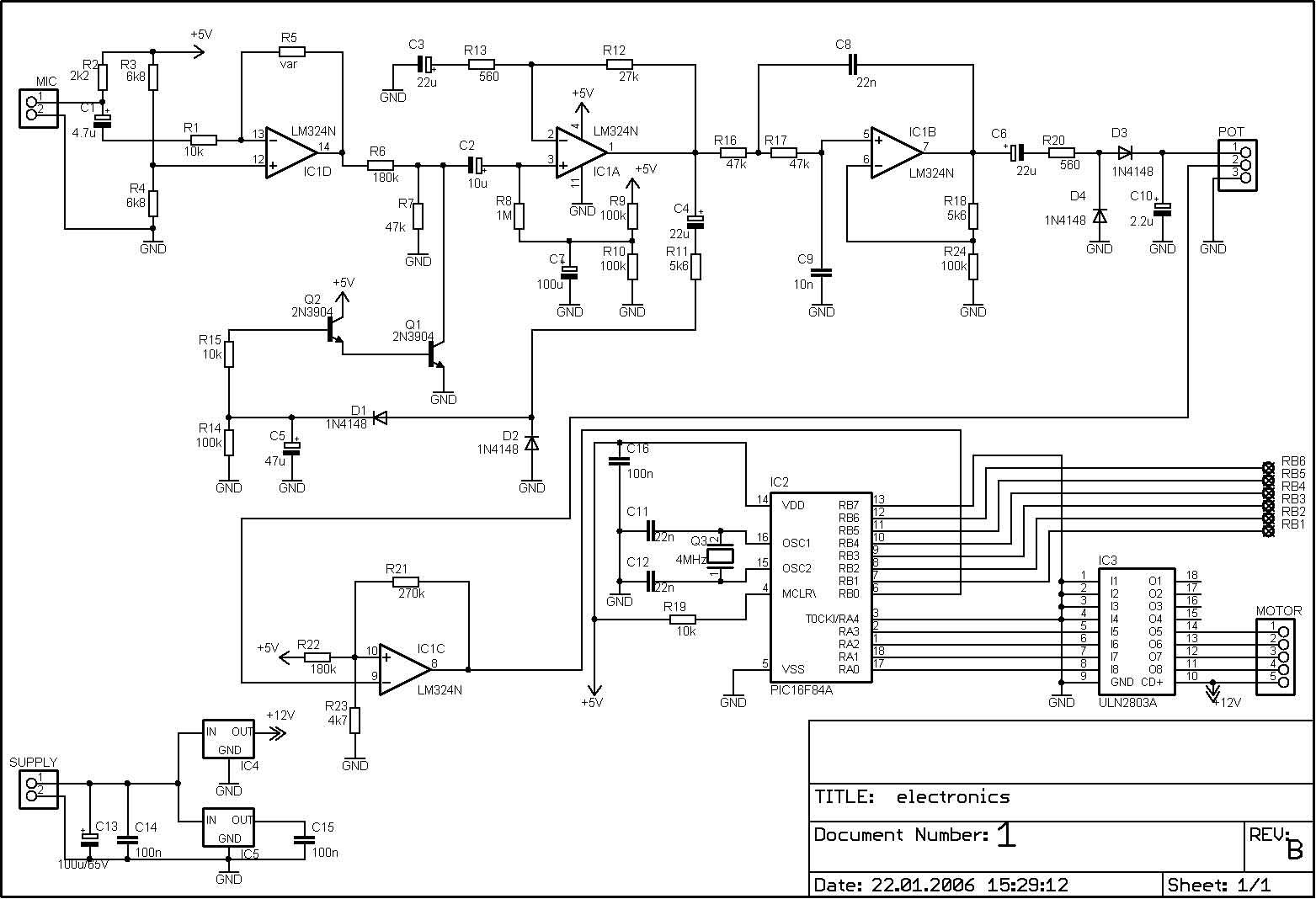
Original circuit
The original circuit which converts bass beat into pulses is from Dan Fraser (updated by Tomi Engdahl). I only replaced the line-out control with microphone and removed the 555 circuitry because of the software solution. The very-own in this project is the software for the PIC microcontroller.
Because of the AGC circuit theres no need for potentionmeters for sensitivity adjust. I replaced them with trimmers. Now the microphone is on the control electronics because theres no need to place it outside the box and the possible noises from the surroundings are reduced.
You have to choose the distance between Lens-Lamp-Parabola to get sharp beams. Its all about optics. That little �wall� (hindrance) before the Lamp doesnt let the white light to passthrough the Lens.
I have that box from a friend who had there a bigger home-made parabola. So the box with mine could be smaller
but i didnt want to resize it. Its OK.
CADsoft
You will need Eagle from CADsoft to view the .sch and .brd files. I programmed the PIC with Ic-Prog using a simple JDM programmer.
Schematics (.sch & .brd)
Board and Board Parts
My first PIC project
This is my first PIC project. While I developed the code i learnt very much about coding a PIC. If you are interested in building it up please let me know! I would really like to know if my project is useful for other people too.
The complete document
I have the complete document of this project including explanations, program flowchart, etc. but only in Hungarian. If you want it e-mail me!
For more detail: Discolight effect with bass beat control using PIC16F84A
- How does the motor respond to bass beats?
The motor rotates one direction for a predefined time in full stepping when a bass beat is recognized. - What determines the number of rotations per direction?
A random number generator between 1 and 4 written in the code dictates how many times the motor rotates before changing direction. - Can I adjust the rotation speed and length?
Yes, pushbuttons allow you to adjust rotation speed and length, with values limited to prevent register overflow. - How does the system handle fast tempos?
If the tempo is too fast (less than 400 milliseconds), the motor changes direction immediately after the current cycle. - When does the motor switch to slow half-stepping?
The motor starts rotating slowly in half-stepping if no beat is detected for 15 seconds while stopped. - Why was the delay increased to 200msec?
The delay was increased from 180msec to 200msec because the microphone setup causes room echoes that influence operation. - Do settings persist after power loss?
Yes, settings are saved in EEPROM so they do not get lost after shutdown. - What software is needed to view the schematics?
You need Eagle from CADsoft to view the .sch and .brd files.