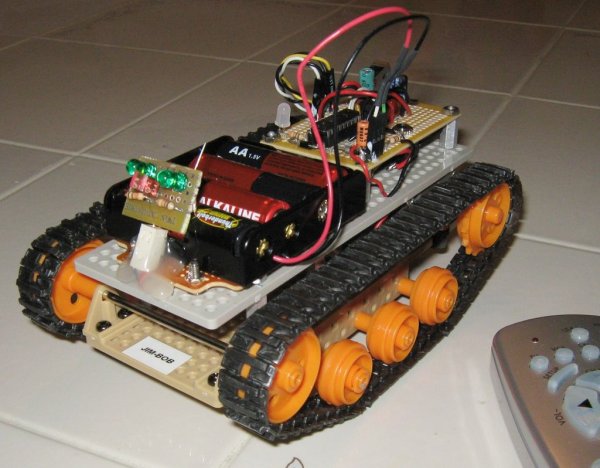
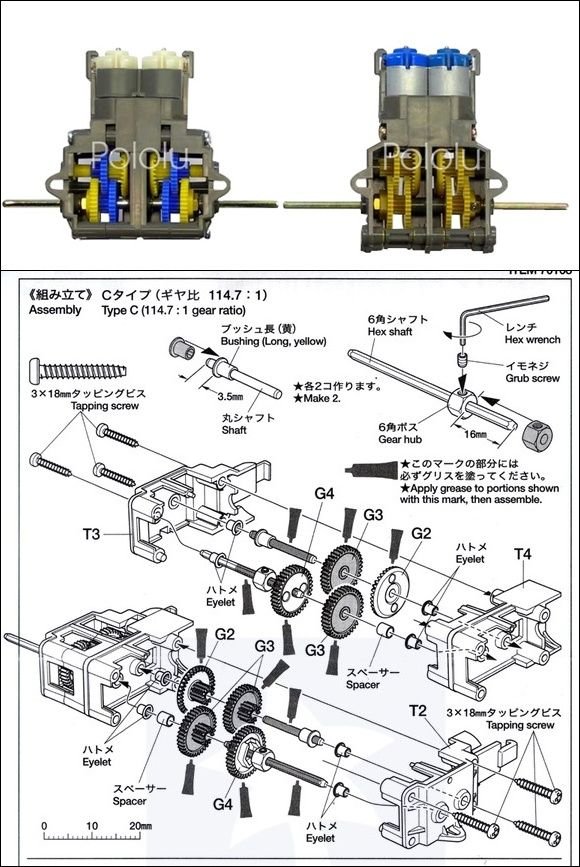
Step 1: Assembling the Double Gearbox
A basic hobby motor turning at 12,300 RPM is basically useless without a good gearbox. Just touching the shaft will stall the motor. I obtained a Tamiya double gearbox kit for under $10, which through a series of gears provided a ratio of 114.7:1 at 115RPM. There were a lot of small parts in this kit; and it looks a little intimidating; but the pictorial instructions were more than adequate. The drive train for a tracked vehicle would require left-hand and right-hand gear-head motors; so having both sides together in one package is a real convience (one gearbox to mount instead of two).
 Step 2: 2 Plate Set for drive Train Body
Step 2: 2 Plate Set for drive Train Body
This Tamiya kit will be used for the base and a parallel upper level. The angled pieces provide bearings for the wheel axles (there will be 5 axles and 10 wheels); which will attach to the bottom plate along with the double gearbox. The upper place will support the battery pack and the micro-controller circuit board.
Step 3: Wheel and Track Set
This is the third and last Tamiya set (each under $10) that go together for a tank tracked platform. Note that there are several different lengths of tread (you will end up with 2 unused pieces 2 3/4″ long).
Step 4: Underside of the Tank
The only wheels with sprockets are attached to the double gearbox hex shaft; all other wheels use the round shafts and are free turning (which will come in handy when the tank turns, and one track moves forward and the other in reverse).
 Step 5: Stand-offs for Upper Plate
Step 5: Stand-offs for Upper Plate
Four each 4-40 hex standoffs are attached to the lower plate to support the upper plate. 2 layers of double-stick foam tape are placed on the gearbox to support the far end of the upper plate.
For more detail: IR Remote Controlled Tracked Robot