Summary:
The project implements a voice-controlled wheelchair using a PC-based, speaker-dependent speech recognition system (VB6.0) that recognizes five commands: Run, Stop, Left, Right, and Back. Recognized commands are sent via RS232 and a 434 MHz RF link to a PIC16F72 microcontroller, which drives two geared motors through H-bridges to move the wheelchair. The system is programmable (user training), uses microphones and relays, and is powered by batteries with regulated supply.
Parts used in the Voice Controlled Wheelchair:
PIC16F72 microcontroller
RF 434MHz transmitter and receiver
Electro-magnetic relays
Microphone
Geared motors (60 RPM)
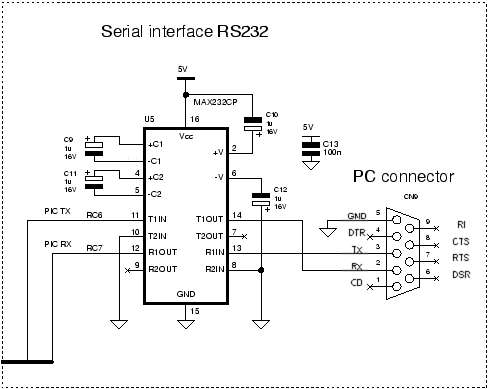
Serial port RS232 interface (MAX232 implied)
Diodes
Resistors
IC 7805 voltage regulator
Battery (6V or 12V mentioned; batteries for Tx/Rx also noted)
Crystal oscillator
LEDs
PCB
IC base
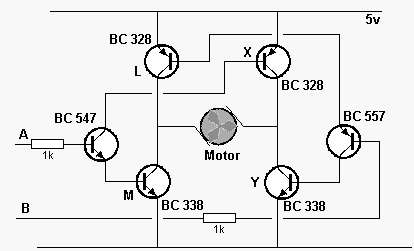
H-bridge motor driver circuits
The Project aims at controlling a wheelchair for handicaps by means of human voice. The speech recognition system is a useful way of implementation and is easy to use programmable speech recognition circuit. Programmable, in the sense that user can train the words (or vocal utterances) he needs the circuit to recognize. This board allows the user to experiment with many facets of speech recognition technology. It has 8-bit data out, which can be interfaced with any microcontroller for further development. Some of interfacing applications which can be made are controlling home appliances, wheelchair movements, Speech Assisted technologies, Speech to text translation, and many more.
The wheelchair is controlled by voice commands. This can be moved in forward and reverse direction using geared motors of 60RPM. Also this wheelchair is a type of robot which can take sharp turnings towards left and right directions. This project uses PIC16F72 MCU as its controller. This project uses 6V battery.
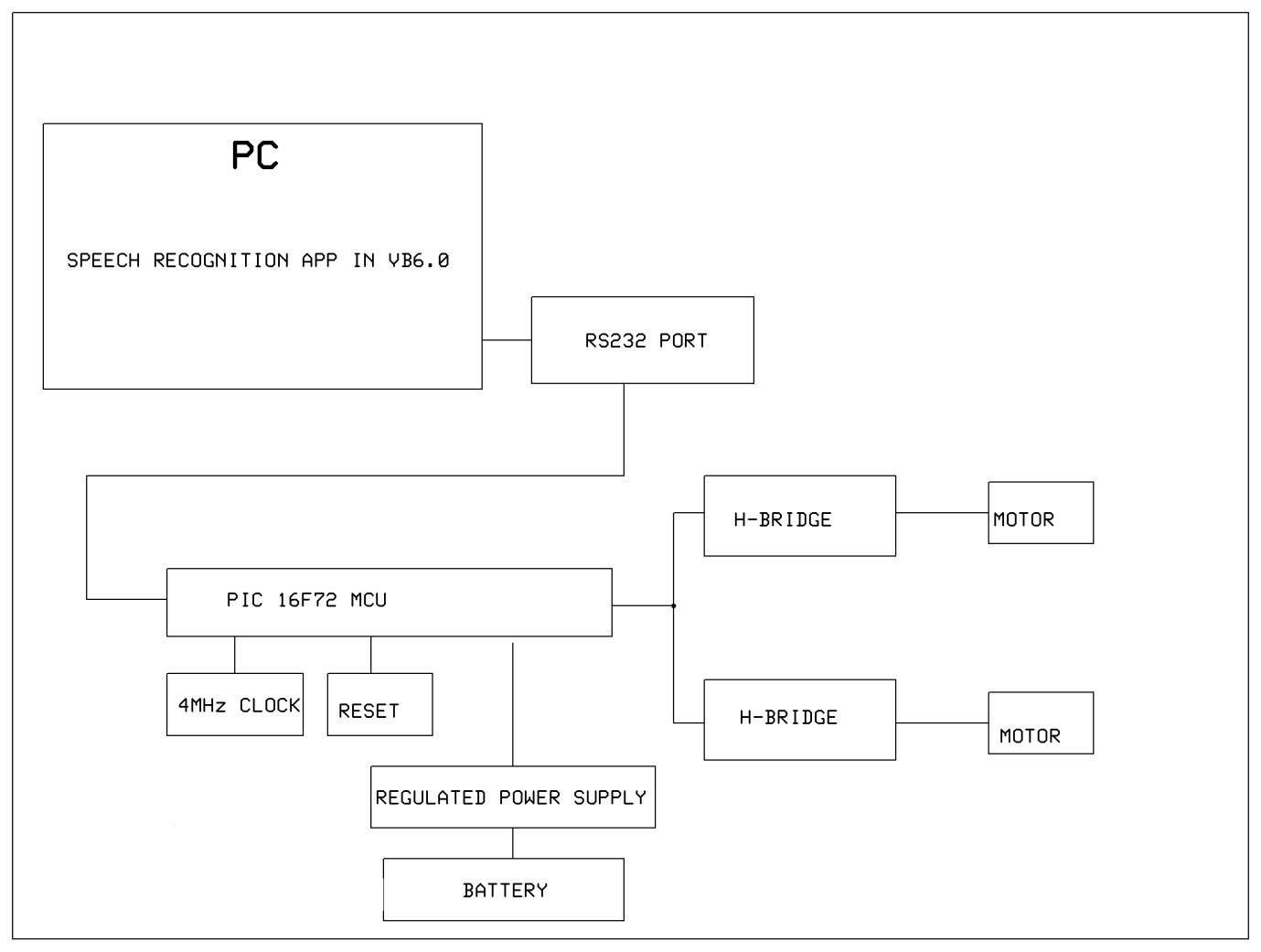
In this project, the controlling of a wheelchair by speech will be studied. Commands are spoken into a microphone, followed by an action by the wheelchair. Voice Controlled Wheelchair is a kind of a mobile robot whose motions can be controlled by the user by giving specific voice commands. The speech recognition software running on a PC is capable of identifying the 5 voice commands ‘Run’, ‘Stop’, ‘Left’, ’Right’ and ‘Back’ issued by a particular user. After processing the speech, the necessary motion instructions are given to the mobile platform via a RF link.
The speech recognition software is speaker dependant. The special feature of the application is the ability of the software to train itself for the voice commands(‘Run’, ‘Stop’, ‘Left’, ’Right’ and ‘Back’) for a particular user. The graphical user interface running along with the software provides a very convenient method for the users to train. It also provides many other facilities in operating the wheelchair.
In this project we will be using visual basic (VB6.0) as our speech recognition application.
BLOCK DIAGRAM
COMPONENTS
PIC 16f72 Microcontroller
RF 434MHz Tx-Rx
Electro-magnetic Relays
Mike/ Microphone
Geared motors
Serial port- RS232
Diode
Resistors
IC 7805- Voltage regulator
Battery
Crystal oscillator
LED
PCB
IC base
WORKING
The speech recognition system is a useful and easy to use programmable speech recognition circuit. Programmable, in the sense that user can train the words (or vocal utterances) he needs the circuit to recognize. This board allows the user to experiment with many facets of speech recognition technology. It has 8 bit data out which can be interfaced with any microcontroller for further development. Some of interfacing applications which can be made are controlling home appliances, robotics movements, Speech Assisted technologies, Speech to text translation, and many more.
Robotics has been of interest to mankind for over hundred years. However our perception of robots has been influenced by the media and Hollywood. The vast majority of robots do have several qualities in common. First of all, almost all robots have a movable body. Some only have motorized wheels, and others have dozens of movable segments, typically made of metal or plastic. Like the bones in your body, the individual segments are connected together with joints.
This robot is controlled by voice commands. This can be moved forward and reverse direction using geared motors of 60RPM. Also this robot can take sharp turnings towards left and right directions. This project uses PIC16F72 MCU as its controller. This project uses 12V battery. Voice based robotic control is an interesting voice based project, mainly useful for industrial applications, surveillance applications. This project gives exact concept of controlling a robot by a voice instruction. This project is the first step to design of voice based robotic automation projects.
The speech recognition system is easy to use programmable speech recognition circuit. Programmable, in the sense that the system to be trained the words (or vocal utterances) user wants the circuit to recognize. This board allows us to experiment with many facets of speech recognition technology. It has 8 bit data out which can be interfaced with any microcontroller. Some of interfacing applications which can be made are controlling home appliances, robotics movements, Speech Assisted technologies, Speech to text translation, and many more.
Hence, our project uses a speech recognition application installed in a PC. This application is used through a RS232 port which gives access to the micro controller and the other hardware circuit. A mike is connected to the PC, when we speak a specific command whose respective program is stored in the PC through the mike then our hardware (wheelchair) will move according to the given command. The entire working is further explained with the help of circuit diagram.
To reduce complexity we have divided the circuit in following parts –
1. Power supply
2. PC ( speech recognition application )
3. Motor driving circuit
4. RF transmitter and receiver
5. Microcontroller
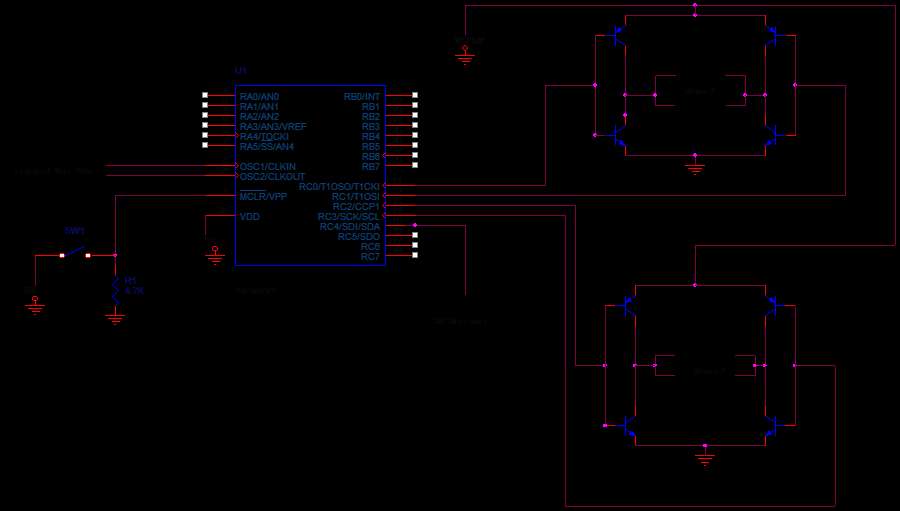
CIRCUIT DIAGRAM
The working of voice operated wheelchair can be explained in the following steps-
Step 1– The very first step requires installing the software used for voice recognition i.e. VB 6.0 along with the additional Microsoft direct text-speech tool on a computer.
Step 2– After installing the software we check the working of our software part by speaking through mike, if the front end of VB recognizes the command then it shows a message box in which the spoken command is written.
Step 3– Once the speech recognition part is installed and checked then comes the connecting of RF transmitter to the serial port of PC using MAX232 and a 9V battery is also connected to the transmitter for running it. The transmitter receives serial data from the PC and transmits it.
Step 4– Now we connect the 9V batteries to RF receiver, two H-bridge circuits and the voltage regulator. Now our hardware is ready to receive command and move according to the user.
Step 5– Now when the user speaks a command in to mike then a transmitted signal is received is then it is send to the i/p pin of port C (C4 i.e. 15) and the microcontroller reads the command and compares the values of port C according to the following table.
Operation
C0
C1
C2
C3
Forward
High
Low
High
Low
Backward
Low
High
Low
High
Right
Low
High
High
Low
Left
High
Low
Low
High
As the above table describes the various movements of wheelchair due to the high and
low values set by the microcontroller to the o/p pins of port C i.e pin number from 11-14
(C0, C1, C2, C3). The pin C0 and C1 of port C are connected to the H-bridge which operates motor1 while pin C2 and C3 are connected to the other H-bridge which controls movement of motor2. Thus the two motors move according to the data on o/p pins of port C and our wheelchair moves in the required direction.
Quick Solutions to Questions related to Voice Controlled Wheelchair:
What voice commands does the system recognize? The system recognizes Run, Stop, Left, Right and Back.
Can the speech recognition be trained for a user? Yes, the speech recognition is speaker dependent and can be trained for a particular user via the GUI.
How are recognized commands sent to the wheelchair hardware? Commands are sent from the PC via RS232 to an RF transmitter, transmitted over 434 MHz, and received by the RF receiver connected to the microcontroller.
Which microcontroller is used to control the wheelchair? The project uses the PIC16F72 microcontroller.
How many motors are used and how are they driven? Two geared motors are used; each motor is driven by an H-bridge connected to output pins of port C on the microcontroller.
What power supply components are included? The system uses batteries (6V or 12V mentioned), and an IC 7805 voltage regulator for supply regulation.
Which software is used for speech recognition? Visual Basic 6.0 along with Microsoft direct text-speech tools is used for the speech recognition application.
Where is the microphone connected? The microphone is connected to the PC to provide audio input to the speech recognition application.
How does the microcontroller determine movement directions? The microcontroller reads input data on port C, then sets C0–C3 outputs High/Low according to a table to drive the two H-bridges and control motion.
What interface chip is used to connect PC serial port to the transmitter? The MAX232 is used to interface the PC serial port to the RF transmitter.
I am an experienced technical writer holding a Master's degree in computer science from BZU Multan, Pakistan University. With a background spanning various industries, particularly in home automation and engineering, I have honed my skills in crafting clear and concise content. Proficient in leveraging infographics and diagrams, I strive to simplify complex concepts for readers. My strength lies in thorough research and presenting information in a structured and logical format.
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt-out if you wish. ACCEPTCheck Privacy Policy
Manage consent
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.
 The wheelchair is controlled by voice commands. This can be moved in forward and reverse direction using geared motors of 60RPM. Also this wheelchair is a type of robot which can take sharp turnings towards left and right directions. This project uses PIC16F72 MCU as its controller. This project uses 6V battery.
The wheelchair is controlled by voice commands. This can be moved in forward and reverse direction using geared motors of 60RPM. Also this wheelchair is a type of robot which can take sharp turnings towards left and right directions. This project uses PIC16F72 MCU as its controller. This project uses 6V battery.