Summary of DC Motor Drive Circuit in Proteus ISIS
This article shows how to simulate a DC motor drive in Proteus ISIS: first by directly applying logic states to motor terminals, then by controlling motor direction with a PIC16F877A using MikroC Pro for PIC. It explains motor polarity behavior, details wiring with Logic State and Motor components, and provides microcontroller code that sets PortB outputs based on two input buttons to rotate the motor clockwise or anticlockwise. Simulation files and hex are available to subscribers.
Parts used in the DC Motor Drive Circuit in Proteus ISIS:
- Motor (Proteus library)
- Logic State (Proteus library)
- PIC16F877A microcontroller (Proteus library)
- Push buttons (connected to PORTD inputs)
- Connections/wires in Proteus ISIS
- MikroC Pro For PIC (compiler for generating hex)
Hello friends, hope you all are fine and enjoying good health. In the previous posts, we have seen How to design a 5V DC power supply in Proteus ISIS and after that we have also discussed How to design a variable DC Power supply using LM317.So, now today we will check how to design a DC Motor Drive Circuit in Proteus ISIS. DC motor is present in Proteus and quite easy to use. First we will simple drive it by applying voltage on its both sides i.e. direct method and after that we will automate it and will drive the circuit using PIC Microcontroller. The microcontroller I am gonna use will be PIC16F877A and the compiler will be MikroC Pro For PIC.
This tutorial is not a correct method of driving any DC motor. In this tutorial, I am just giving an overview of How to design a DC Motor Drive Circuit in Proteus ISIS so you can say this tutorial is more about DC motor in Proteus software. So, don’t try it in hardware. DC motor is a simple motor which needs polarity difference at its two ends. IF this polarity is in forward direction then DC motor moves in one direction and if we reverse the polarity then the DC motor moves in the opposite direction. So, let’s get started with DC Motor Drive Circuit in Proteus ISIS.
Simple DC Motor Drive Circuit in Proteus ISIS
- First of all I will show you the simple control of DC Motor in Proteus so that you get an idea how this motor works.
- Add these two components from the Proteus library:
- Motor
- Logic State

- Logic State has two states 1 and 0. When its 0 means 0V and when at 1 means 5V.
- Now design the circuit as shown in the below figure:
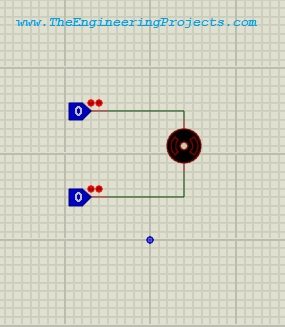
- Now I have added two Logic State on both the sides of motor. Direction of motor will depend on these logic. So, their will be total four states:
- When both states are at 0, motor will not move and remain stationary.
- When both states are at 1, still the motor will not move and remain stationary.
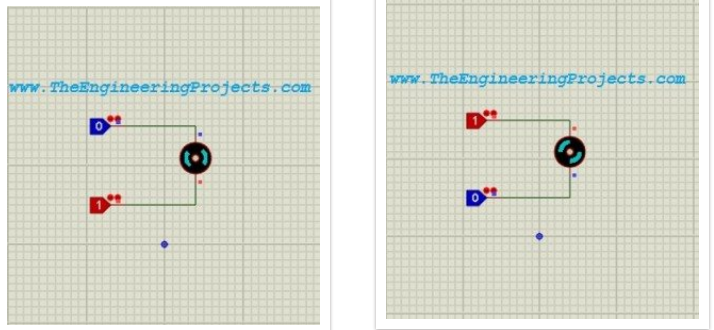
- The motor will move Clockwise when upper state is at 1 and lower at 0.
- The motor will move Anti-Clockwise when upper state is at 0 and lower at 1.
DC Motor Drive Circuit Using PIC Microcontroller
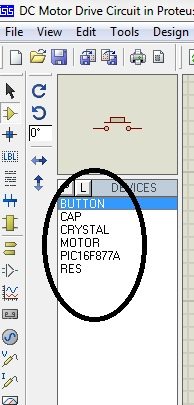
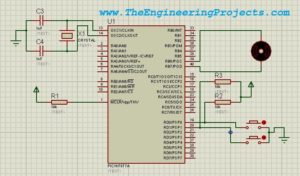
- Now we will drive our motor using PIC Microcontroller, add below components from the Proteus library.
- Join these components and make a circuit as shown in the below figure:
- Now create a new project in the MikroC Pro For PIC and add the below code into it.
Code provided by www.TheEngineeringProjects.com */
#define M1 PORTB.F7
#define M2 PORTB.F6
#define B1 PORTD.F0
#define B2 PORTD.F1
void main() {
TRISB=0;
TRISD=0xFF;
PORTB = 0;
while(1){
if(B1 == 0){PortB=0xAA;}
if(B2 == 0){PortB=0x55;}
}
}
- Now burn the hex file of this project in the microcontroller of the Proteus file.
- If everything goes well, then when you click one button the motor will move clockwise and when you click other button the motor will move anti-clockwise.
- I have also shown the simulation in the video below.
Video Tutorial
- A complete video demonstration of the above tutorial is as follows:
Note:
- The Proteus circuit of DC motor drive and the hex file to burn in the microcontroller has been emailed to all the subscribed members.
- If you need these files, then subscribe to our newsletter and these files will be emailed to you as well.
That’s all about DC Motor Drive Circuit in Proteus ISIS. In the coming tutorial, we will have a look at How to drive a Stepper Motor in Proteus ISIS.
- How do you make the DC motor rotate clockwise in Proteus?
Set the upper Logic State to 1 and the lower Logic State to 0 so the motor moves clockwise. - How do you make the DC motor rotate anti-clockwise in Proteus?
Set the upper Logic State to 0 and the lower Logic State to 1 so the motor moves anti-clockwise. - What happens if both Logic States are 0 or both are 1?
The motor will remain stationary when both states are 0 or both are 1. - Can the PIC16F877A control motor direction in the simulation?
Yes, the PIC16F877A is used to control motor direction by setting PortB outputs based on button inputs. - How are buttons used to control the motor with the microcontroller?
The code reads two buttons on PORTD; when one button is pressed PortB is set to 0xAA for clockwise and when the other is pressed PortB is set to 0x55 for anti-clockwise. - Which compiler is used to generate the hex file for the PIC?
The MikroC Pro For PIC compiler is used to create the project and generate the hex file. - Should this tutorial method be used to drive motors in hardware?
No, the article states this tutorial is an overview for Proteus and is not a correct method for hardware motor driving; do not try it in hardware. - How do I run the microcontroller simulation in Proteus?
Create the project in MikroC, compile to generate the hex, burn the hex into the PIC16F877A in Proteus, then run the simulation and use the buttons to control the motor.