I bought most of the parts to built a self balancing bot many months ago. This time I didn’t use cheap Chinese stuff. I actually bought Pololu parts from a local shop.
Pololu has a nice range of motors and motor controllers. I wanted to keep the bot small so I used the micro metal gear motors with 2 matching 60mm wheels. I did go for the most powerful version of the micro metal gear motors. To control the motors I got a DRV8833 break out board.
For the electronics I used one of my own PCB creations, a Bajduino of course ![]() It’s just a small (50x50mm) break out board for an ATmega328. I’m running the ATmega @ 16MHz and 3.3V. It’s out of spec according to the datasheet but it works… I also needed an IMU of course. I found a MP6050 sensor in my parts box. The MPU6050 combines a 3 DOF gyro and 3 DOF accelerometer in a small package, ideal for a self balancing bot.
It’s just a small (50x50mm) break out board for an ATmega328. I’m running the ATmega @ 16MHz and 3.3V. It’s out of spec according to the datasheet but it works… I also needed an IMU of course. I found a MP6050 sensor in my parts box. The MPU6050 combines a 3 DOF gyro and 3 DOF accelerometer in a small package, ideal for a self balancing bot.
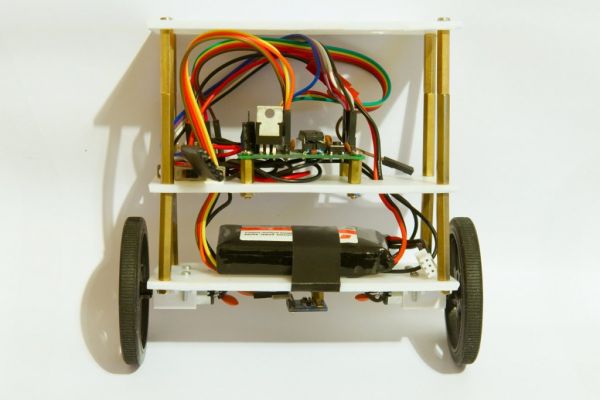
The chassis is made from a sheet of polystyrene, I made 3 small plates out of a big sheet. Polystyrene is very easy to cut up with a sharp knife. Very handy to quickly make a custom robot chassis. I then drilled holes in the plates to fit the motors and electronics. To connect the 3 chassis plates I used brass spacers. I mounted the MPU6050 sensor to the bottom of the lowest chassis plate.
I did have some trouble with the little motors. During my initial tests I noticed that the MPU6050 sensor would stop working when driving the motors. I hooked up my oscilloscope to the 3.3V that powers the sensor and saw that the regulator on my board was oscillating.
Brushed DC motors are noisy things so I soldered the biggest (0,22µF) ceramic capacitors I had on hand to each motor. This did the trick and the regulator now gives a nice stable 3.3V.
The hard part in building a self balancing bot is coding it. Luckily there are some smart people that have shared their code and ideas about self balancers. So I just borrowed a lot of code I found online and turned it in to something that makes my bot balance.
First thing I needed was code to get the data from the MPU6050 sensor. You need some kind of filter to get good results. There are different ways of doing this. The guys from TKJElectronics have shared the necessary code to get the data from the MPU6050 sensor.
For more detail: Building a self balancing bot