I know the general rule of world that “reading makes man ready,writing makes man everyday but practice makes man perfect.” Only theoretical knowledge is not enough for an E.C (Electronics and communication engineering)student. A project is one of the subjects in which we have to develop hardware with software, where we not theoretically analyze the system but also design software and implement the same into the IC. The final phase is to test the functionally of project action. From this subject student can get opportunity of real implementation of theoretically concept of “robotics” and “software in atmega 16” in the practical filed. Here programing, system testing and quality checking and control This documentation the report of mobile operated land rover from this documentation we can understand the hardware and software engineering concept can be implemented to a real problem.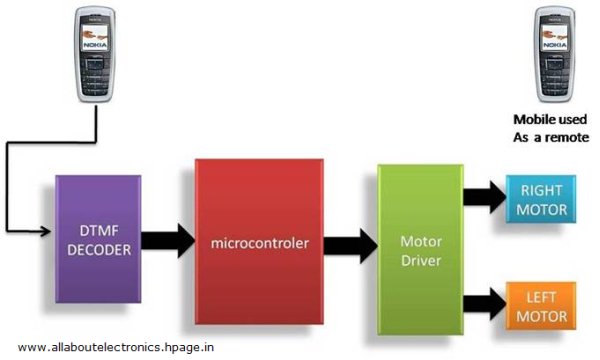 PROJECT OVERVIEW
PROJECT OVERVIEW
The important components of this robot are a DTMF decoder, microcontroller and motor driver.An MT8870 series DTMF decoder is used here. All types of the MT8870 series use digital counting techniques to detect and decode all the 16 DTMF tone pairs into a 4-bit code output.The built-in dial tone rejection circuit eliminates the need of pre-filtering. when the input signal given at pin 2(IN-) in single-ended input configuration is recognized to be effective, the correct-bit decode signal of the DTMF tone is transferred to (pin11) through (pin14) outputs.The pin11 to pin14 of DTMF decoder are connected to the pins of microcontroller (pa0 to pa3).The ATmega16 is a low power, 8-bit CMOS microcontroller based on the AVR enhanced RISC architecture. it provides the following features: 16kb of in-system programmable flash program memory with read-while-write capabilities, 512 bytes of eeprom, 1kb SRAM, 32(IO) lines.outputs from port pins PD0 through PD3 and PD7 of the microcontroller are fed to the inputsIN1 through IN4 and enable pins (EN1 and EN2) of motor driver L293D IC, respectively to drive two geared dc motors. Switch S1 is used for manual reset. The microcontroller output is not sufficient to drive the dc motors, so Current drivers are required for motor rotation.The L293D is a quad, high-current, half-h driver designed to provide bidirectional drive currents of upto600mA at voltages from 4.5V to 36V. It makes it easier to drive the dc motors. The L293D consists of four drivers. Pins IN1 through IN4 and OUT1 through OUT4 are the input and output pins respectively, of driver 1 through driver 4. Drivers 1 and 2, and driver 3 and 4 are enabled by enable pin 1(EN1) and pin 9 (EN2), respectively. When enable input EN1 (pin1) is high, drivers 1 and 2 are enabled and the outputs corresponding to their inputs are active. WORKING :
WORKING :
For more detail: CELLPHONE OPERATED LAND ROVER