MAXIM’S MAX4295 CIRCUIT PROVIDES CLASS D MOTOR CONTROL
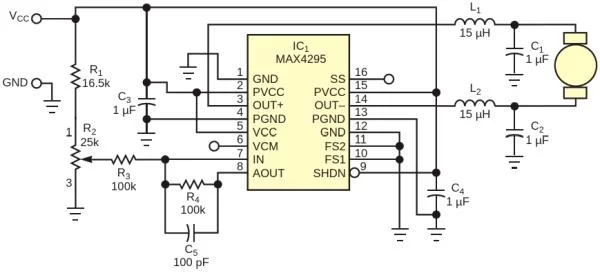
Class D audio amplifiers provide a dual benefit for battery-powered portable devices (Figure 1). They enhance battery life, and they produce much less power dissipation than do their linear cousins. Those features make Class D amplifiers ideal candidates for controlling speed and direction in small electric motors. The standard application circuit for a Class D audio […]
MAXIM’S MAX4295 CIRCUIT PROVIDES CLASS D MOTOR CONTROL Read More »