Summary of Fire Fighting Robotic Vehicle
This project develops an RF-controlled robotic vehicle that remotely fights industrial fires. Using an 8051 microcontroller, RF transmitter/receiver pairs with encoder/decoder modules relay push-button commands to steer the robot (forward, backward, left, right). Two motors driven via a motor driver IC control movement, while a pump and directional water jet are actuated by RF commands. The vehicle is battery powered and carries a water tanker. Future enhancement suggests adding a wireless camera for live visual feedback.
Parts used in the Fire Fighting Robotic Vehicle:
- 8051 family microcontroller
- RF transmitter module
- Encoder device (for transmitter end)
- Push buttons (input switches)
- RF receiver module
- Decoder device (for receiver end)
- Motor driver IC
- Two DC motors
- Battery (power supply)
- Water tanker
- Pump (for water jet)
- Robotic vehicle chassis
We all are well aware of the major fire accidents that frequently take place in nuclear power plants, petroleum refineries, gas tanks, chemical factories and other large scale industrial units and result in very serious consequences. Thousands of people have lost their lives due to such hazardous accidents. Therefore, the main objective of this project is to develop a robotic vehicle capable of fighting the fire remotely by using an RF technology, in the event of any major fire accidents in industries.
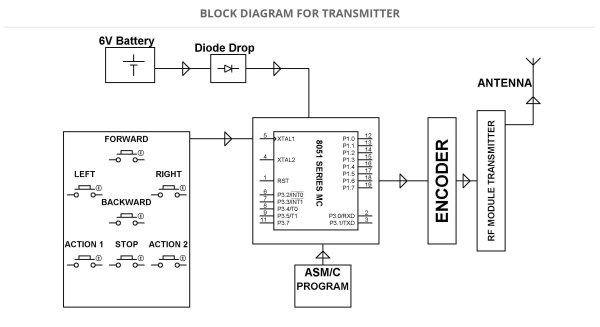
 An RF transmitter is connected to the transmitter end with the help of an encoder device. Push buttons are connected to the microcontroller as input switches. Commands are sent by the push buttons to the receiver to control the movement of the robot either in forward, backward, left or right directions.
An RF transmitter is connected to the transmitter end with the help of an encoder device. Push buttons are connected to the microcontroller as input switches. Commands are sent by the push buttons to the receiver to control the movement of the robot either in forward, backward, left or right directions.
An RF receiver is connected to the receiver end with help of a decoder device. The two motors are interfaced to the microcontroller through a motor driver IC, which is used to change the directions of the motor. This system works with an 8051 family microcontroller and a battery for power supply.
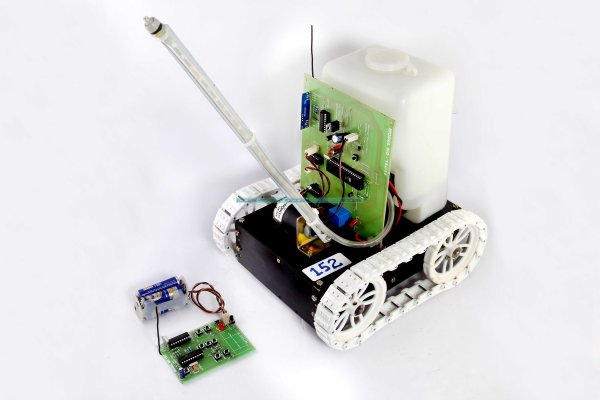
 A robotic vehicle is loaded with a water tanker. The pump is remotely controlled by the RF commands sent by the transmitter, and, based on these commands, the receiver controls the directions of water jet to the fire.
A robotic vehicle is loaded with a water tanker. The pump is remotely controlled by the RF commands sent by the transmitter, and, based on these commands, the receiver controls the directions of water jet to the fire.
The future scope of this project can be implemented by interfacing it with a wireless camera so that a user can see the operation of this remote robot clearly on a screen.
For more detail: Fire Fighting Robotic Vehicle
- How are movement commands sent to the robot?
Push buttons send commands to the RF transmitter which, via an encoder, transmits signals to the receiver and microcontroller to control movement. - Can the robot move in multiple directions?
Yes, the receiver controls the robot to move forward, backward, left, or right based on RF commands. - What microcontroller family is used in this project?
The system uses an 8051 family microcontroller. - How are the motors controlled?
Two motors are interfaced to the microcontroller through a motor driver IC which changes motor directions. - How is the water jet controlled?
The pump and direction of the water jet are controlled remotely by RF commands received by the receiver. - What powers the robotic vehicle?
The vehicle is powered by a battery. - What encoder and decoder roles are in the system?
The encoder is used at the transmitter end to encode commands before RF transmission and the decoder at the receiver end decodes received signals for the microcontroller. - Can the system provide visual feedback to the user?
The article suggests future scope to interface a wireless camera so a user can see operations on a screen.