Summary of ROBOTIC ARM PROJECT PIC16F877 CCS C VISUALBASIC COMPUTER-CONTROLLED
The robotic arm project uses a PIC16F877 microcontroller controlled from a PC via RS232; firmware is written in CCS C and a Visual Basic program provides the PC-side interface. Motor drivers use ULN200x transistor driver ICs. The project package includes source code, PCB and circuit drawings, and mechanical dimensions for the arm.
Parts used in the Robotic Arm Project:
- PIC16F877 microcontroller
- ULN200x motor driver IC (transistor driver array)
- RS232 serial port interface components (for PC communication)
- DC motors or servomotors for arm joints (as per circuit drawings)
- Printed Circuit Board (PCB) as per provided PCB drawings
- Power supply components (as per circuit drawings)
- Cabling and connectors for serial and motor connections
- Mechanical arm components with provided dimensions and drawings
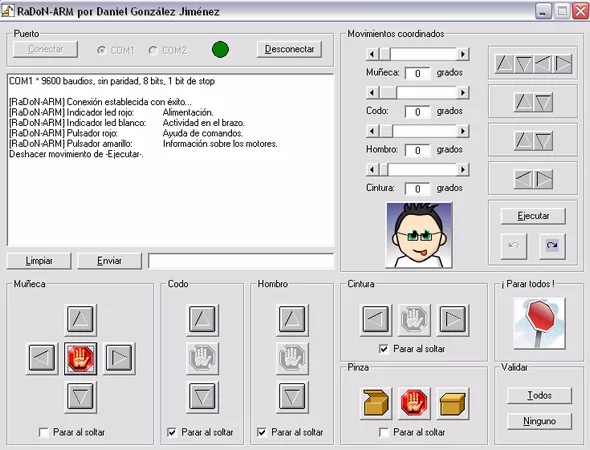
- Computer running Visual Basic interface software
- CCS C compiler source code files for PIC firmware
The robotic arm project and all resources are quite detailed PIC16F877 microcontroller in the control unit in the project has been kullaıl communicate with the computer is done via the RS232 serial port interface…Electronics Projects, Robotic ARM Project PIC16F877 CCS C VisualBasic Computer-controlled”microchip projects, microcontroller projects, pic16f877 projects, “

The robotic arm project and all resources are quite detailed PIC16F877 microcontroller in the control unit in the project has been kullaıl communicate with the computer is done via the RS232 serial port interface program with Visual Basic has prepared a nice pic ccs codes written in c.
Motor Driver IC is used as a ULN200A made with transistor drivers. The Source code, as well as circuit pcb printed circuit drawings and the robot arm circuit belonging to the dimensions, the drawings.
Source: ROBOTIC ARM PROJECT PIC16F877 CCS C VISUALBASIC COMPUTER-CONTROLLED alternative link: robotic-arm-project-pic16f877-ccs-c-visualbasic-computer-controlled.RAR
- What microcontroller is used in the project?
The project uses the PIC16F877 microcontroller. - How does the robotic arm communicate with the computer?
Communication with the computer is done via the RS232 serial port interface. - What language is the microcontroller code written in?
The PIC firmware is written in CCS C. - What software is used on the PC side?
A Visual Basic program is used for the computer-controlled interface. - Which motor driver IC is used?
The project uses a ULN200x transistor driver IC as the motor driver. - Are PCB and circuit drawings provided?
Yes, the source package includes circuit PCB printed circuit drawings and mechanical drawings. - Does the source package include source code?
Yes, the package includes source code for the PIC and the Visual Basic program. - Are mechanical dimensions for the robot arm included?
Yes, the robot arm circuit and dimensions drawings are included.