
Summary of 8051 MICROCONTROLLER
Summary: The article describes several 8051 microcontroller projects: an electronic locker with keypad, LCD, motor driver and alarm; LED interfacing with switch-controlled patterns; a microcontroller-based piano generating Indian sargam notes; and multi-pattern running lights (pendulum operation). Each project includes circuit descriptions and C code for the AT89C2051/8051 family.
Parts used in the 8051 Microcontroller based electronic locker system:
- AT89C2051 8-bit microcontroller (8051 family)
- 4x3 Keypad (0-9, *, #)
- 16x2 LCD display (data pins to P1, RS/RW/E to P0.2/P0.3/P0.4)
- L293D motor driver IC
- DC motor (for locker actuation)
- Buzzer / Alarm
- Push buttons (system menu: open, reset password, close)
- Resistors and pull-ups for keypad and buttons
- Power supply (5V regulator, e.g., 7805 and transformer)
- Connecting wires and PCB or breadboard
8051 Microcontroller based electronic locker system
CIRCUIT DESCRIPTION
Security is a prime concern in our day-today life. Everyone wants to be as much secure as possible.The issue of security is very paramount at home doors and safe. An access control for doors formsvital.link
in a security chain. Therefore we intend to aid in security at home by bringing in an electronic code lock system that involves an individual to enter the password before getting an access to some items, a particular room or building.This code lock system is not just the normal single user code lock system that required a user to insert an already programmed code to gain access to a room or safe; it is a code lock system that has password and enable multiple user access.
The microcontroller based Door locker is an access control system that allows only authorized persons to access a restricted area. The system is fully controlled by the 8 bit microcontroller AT89C2051 which has a 2Kbytes of ROM for the program memory. The system has a Keypad by which the password can be entered through it. When the entered password equals with the password stored in the memory then the door is opened. If we entered a wrong password for more than three times then the Alarm is switched on.
The data pins of LCD are connected to P1 port & RS,R/W,E pins are connected to P0.2,P0.3,P0.4. L293D is used to rotate motor bidirectionaly to open & close the locker. A 4*3 keypad is used to enter the numbers 0 to 9 & ‘*’, ‘#’. There is a system menu, contains three buttons for open locker, reset password & close the locker.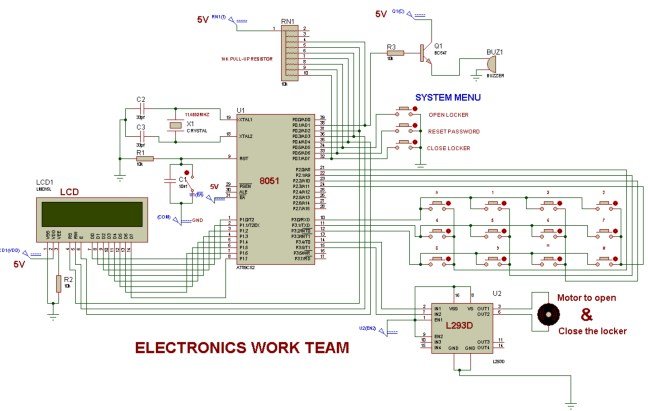
PROJECT CODE
#include< reg51.h >
#define col P2
#define row P3
sbit m1=P3^4;
sbit m2=P3^5;
sbit bu=P0^1;
sbit rs=P0^2;
sbit rw=P0^3;
sbit en=P0^4;
sbit start=P0^5;
sbit rst=P0^6;
sbit mp=P0^7;
sfr lcddata=0x90;
void delay(int a)
{
int i,j;
for(i=0;i<a;i++) for(j=”0;j<1100;j++);” }=”” void=”” command(unsigned=”” char=”” s)=”” initialise=”” of=”” the=”” lcd=”” {=”” lcddata=”s;” rs=”0;” rw=”0;” en=”1;” delay(5);=”” lcddisplaydata(unsigned=”” data=”” writing=”” delay(8);=”” displaydata(unsigned=”” *word)=”” int=”” x;=”” for(x=”0;word[x]!=0;x++)” lcddisplaydata(word[x]);=”” unsigned=”” array[3][4]=”{‘0′,’1′,’2′,’3’,” ‘4’,’5′,’6′,’7′,=”” ‘8’,’9′,’*’,’#’};=”” n=”0;” m=”0;” i,p,q,r;=”” main()=”” colloc,=”” rowloc;=”” array1[4];=”” array2[4]=”{‘3′,’1′,’1′,’2’};” array3[4];=”” locker1:=”” col=”0xFF;” row=”0x00;” m1=”0;” m2=”0;” bu=”0;” mp=”1;” p=”0;” q=”0;” r=”0;” start=”1;” rst=”1;” command(0x01);=”” command(0x38);=”” command(0x0c);=”” command(0x84);=”” displaydata(“press=”” key”);=”” command(0xc0);=”” displaydata(“from=”” system=”” menu”);=”” while(1)=”” if(start=”=0)” goto=”” locker2;=”” else=”” if(rst=”=0)” locker3;=”” locker2:=”” command(0x82);=”” delay(10);=”” displaydata(“enter=”” your”);=”” command(0xc3);=”” displaydata(“password”);=”” delay(80);=”” command(0x80);=”” locker5;=”” locker3:=”” current”);=”” command(0xc4);=”” locker4:=”” command(0x83);=”” new”);=”” displaydata(”=”” password”);=”” locker5:=”” do=”” colloc=”col;” &=”0x0f;” }while(colloc!=”0x0f);” }while(colloc=”=0x0f);” if(colloc!=”0x0f)” rowloc=”0;” break;=”” if(p=”=1)” if(colloc=”=0x0E)” array1[n]=”array[rowloc][0];” n++;=”” locker6;=”” if(q=”=1)” locker7;=”” if(r=”=2)” locker11;=”” array2[n]=”array[rowloc][0];” locker9;=”” array3[n]=”array[rowloc][0];” locker8;=”” locker6:=”” if(n<4)=”” lcddisplaydata(‘*’);=”” if(n=”=4)” delay(50);=”” if(array1[1]=”=array2[1]&&array1[2]==array2[2]&&array1[3]==array2[3]&&array1[0]==array2[0])” displaydata(“right=”” locker14;=”” displaydata(“wrong=”” locker15;=”” locker7:=”” locker4;=”” locker12;=”” locker8:=”” if(array3[1]=”=array2[1]&&array3[2]==array2[2]&&array3[3]==array2[3]&&array3[0]==array2[0])” displaydata(“new=”” password=”” has”);=”” displaydata(“been=”” set”);=”” delay(100);=”” locker1;=”” locker13;=”” locker9:=”” locker10;=”” locker10:=”” displaydata(“conform=”” locker11:=”” locker16;=”” locker12:=”” m++;=”” if(m<3)=”” delay(500);=”” locker13:=”” locker14:=”” delay(125);=”” while(mp!=”0);” locker15:=”” locker16:=”” <=””>
- What microcontroller is used in the electronic locker system?
The system is fully controlled by the 8 bit microcontroller AT89C2051. - How is the password entered in the system?
Password is entered using a 4x3 keypad that provides digits 0–9 and the characters * and #. - What happens after three wrong password attempts?
If a wrong password is entered more than three times then the Alarm is switched on. - How is the LCD connected to the microcontroller?
The data pins of the LCD are connected to port P1 and RS,R/W,E pins are connected to P0.2, P0.3, P0.4. - Which IC is used to drive the motor for locker operation?
L293D is used to rotate the motor bidirectionally to open and close the locker. - Does the system support resetting the password?
Yes, the system menu contains a button to reset the password as described in the article. - Is there a visual prompt for users on the system?
Yes, the LCD displays prompts such as press key from system menu and enter your password. - Are there multiple user accesses supported?
The article states the code lock system has password and enable multiple user access.
