Summary of OPEN-HARDWARE REACHES THE OUTER SPACE WITH UPSAT SATELLITE
The Libre Space Foundation successfully developed and launched UPSat, a fully open-source 2U CubeSat. Launched on April 18th via an Atlas V rocket from Cape Canaveral, the satellite features publicly available hardware and software on GitHub. Its subsystems include power management with solar cells and batteries, an image acquisition system using an embedded Linux board and camera, attitude control via gyroscopes and magnetometers, an STM32-based onboard computer running FreeRTOS, and a CC1120 radio transceiver for communications.
Parts used in the UPSat:
- 7 PV solar cells
- 3 Li-Po rechargeable batteries (3.7V, 4Ah)
- DART4460 embedded board running OpenWRT
- Ximea MU9PM-MH USB camera with lens
- 3-axis digital gyroscope
- Magnetometer
- Sun Tracker pointing vector GPS
- Magneto-Torquers
- STM32F4 microcontroller
- FreeRTOS firmware
- CC1120 RF Transceiver
Libre Space Foundation completed the mission of building a completely Open-Source 2U CubeSat Satellite from scratch. It’s called “UPSat”.
On April 18th at Cape Canaveral in Florida, Atlas V Rocket launched Private Cygnus Cargo Ship, and UPSat was among its cargo.
With both software and hardware parts published on github. UPSat seems to be a real open hardware project.
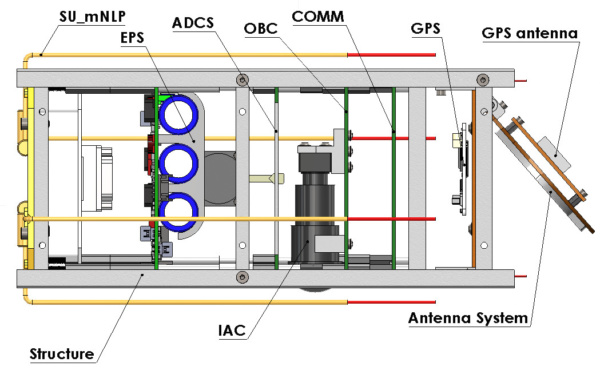
Let’s have a quick overview of the UPSat’s subsystems:
- Electrical Power Subsystem EPS: This subsystem controls the CubeSat’s electrical power. UPSat is powered by 7 PV solar cells and 3 Li-Po rechargeable batteries (3.7V, 4Ah).
- Image Acquisition Component IAC: The goal of the IAC is to shoot relatively good quality images pointing down to the Earth. IAC consists of a linux embedded board( DART4460 running OpenWRT), and a USB camera Ximea MU9PM-MH with attached lens.
- Attitude Determination and Control Subsystem ADCS: The ADCS is armed with 3-axis digital gyroscope, magnetometer, Sun Tracker’s pointing vector GPS and Magneto-Torquers. This subsystem is responsible for stabilization of the cube satellite and orienting it in the desired direction.
- On Board Computer subsystem OBC: The brain of the satellite for decision making and monitoring of all subsystems. It’s based on STM32F4 microcontroller and uses FreeRTOS firmware.
- Communications Subsystem COMMS: It’s based on CC1120, the TI’s High-Performance RF Transceiver. Because of the low current consumption, the success of employing it in previous missions and other couple of reasons, the folks behind this project selected CC1120 among the others.
The project is completely open-Hardware and even the UPSat’s structure design files are available.
Read More: OPEN-HARDWARE REACHES THE OUTER SPACE WITH UPSAT SATELLITE
- What is the primary goal of the Image Acquisition Component?
The goal is to shoot relatively good quality images pointing down to the Earth. - How is the electrical power managed in UPSat?
It is controlled by 7 PV solar cells and 3 Li-Po rechargeable batteries rated at 3.7V and 4Ah. - Which microcontroller serves as the brain of the satellite?
The On Board Computer uses an STM32F4 microcontroller running FreeRTOS firmware. - Does the project offer open source hardware files?
Yes, both software and hardware parts are published on GitHub, including structure design files. - Why was the CC1120 selected for the Communications Subsystem?
It was chosen due to its low current consumption and success in previous missions. - Can you launch UPSat yourself?
No, UPSat was launched on April 18th from Cape Canaveral aboard an Atlas V Rocket carrying the Private Cygnus Cargo Ship. - What components stabilize the cube satellite?
The Attitude Determination and Control Subsystem uses a 3-axis digital gyroscope, magnetometer, Sun Tracker, and Magneto-Torquers.