Summary of EMCOS® HYPERVISOR BY ESOL: NEW VIRTUALIZATION FUNCTION TO EMCOS SCALABLE RTOS
eSOL has launched eMCOS Hypervisor, a virtualization layer for its scalable RTOS. This solution enables concurrent execution of real-time and general-purpose OS applications (like Linux or Android) on a single hardware platform while ensuring full time and space isolation. Key features include advanced scheduling with load-balancing, customizable boot sequences, and easy driver porting via Virtio support and hardware passthrough capabilities.
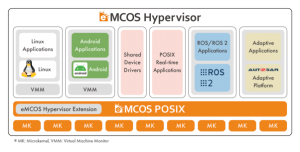
Parts used in the eMCOS Hypervisor:
- eMCOS scalable real-time operating system
- General-purpose OS (Linux or Android)
- Virtual Machine Monitor (VMM)
- Linux standard Virtio drivers
eSOL, a leading global specialist in embedded software systems, announced the immediate availability of its eMCOS® Hypervisor, a ground-breaking embedded virtualization function for the company’s eMCOS scalable real-time operating system (RTOS). eMCOS Hypervisor facilitates the integration of both robust real-time applications on RTOS and feature-rich applications on general-purpose OS – running concurrently on a single hardware platform. Full time and space isolation is provided for each mixed-criticality system.
In terms of architecture, the addition of virtualization to the eMCOS RTOS brings even greater flexibility in mixed-criticality system configuration, making it possible to incorporate general-purpose operating systems like Linux or Android without compromising real-time capabilities and safety.
Among many notable advantages, users can leverage eMCOS’s advanced scheduling capabilities. As eMCOS Hypervisor is implemented by incorporating a mechanism for virtualization into eMCOS POSIX, users can enjoy scheduling features such as load-balancing and time separation, on the same hardware platform as a guest OS.
A further major benefit is the ease of customization relating to the boot sequence of a general-purpose OS. As guest operating systems are started as eMCOS POSIX processes, the boot sequence can be implemented simply as a process start, and is easily customized as sequential start-up and multi-core parallel start-up. The deployment of multiple guest operating systems is performed in a coordinated, optionally load-balanced manner, without impacting the determinism of real-time or safety functions.
Also appealing to users will be the easy porting of drivers. Linux standard Virtio drivers are supported, making it easy to port Linux guests. In addition, drivers that are tightly coupled to the SoC can be ported with ease because the Virtual Machine Monitor (VMM) can filter or passthrough hardware accesses.
Read more: EMCOS® HYPERVISOR BY ESOL: NEW VIRTUALIZATION FUNCTION TO EMCOS SCALABLE RTOS
- What is the primary function of eMCOS Hypervisor?
It facilitates the integration of robust real-time applications and feature-rich general-purpose OS applications running concurrently on a single hardware platform. - Can I run Linux or Android alongside my real-time applications?
Yes, users can incorporate general-purpose operating systems like Linux or Android without compromising real-time capabilities and safety. - Does the hypervisor provide isolation between different systems?
Full time and space isolation is provided for each mixed-criticality system. - How are guest operating systems started in this architecture?
Guest operating systems are started as eMCOS POSIX processes, allowing the boot sequence to be implemented simply as a process start. - Is it possible to customize the startup sequence for multiple cores?
Yes, the startup can be customized as sequential start-up or multi-core parallel start-up. - How does the system handle driver porting for Linux guests?
Linux standard Virtio drivers are supported, making it easy to port Linux guests. - Can tightly coupled SoC drivers be used easily?
Yes, the Virtual Machine Monitor can filter or passthrough hardware accesses to allow easy porting of drivers tightly coupled to the SoC.