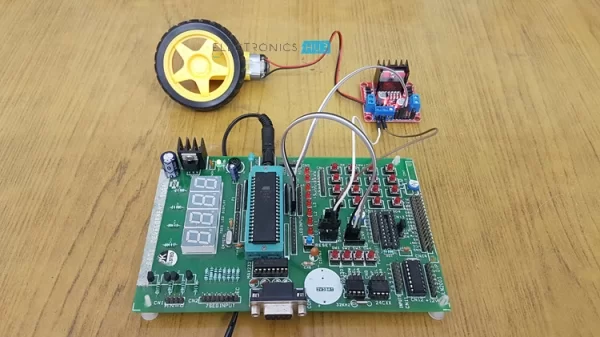
DC MOTOR INTERFACING WITH 8051 MICROCONTROLLER
In this project, we will learn about L293D and L298N Motor Drivers and also about Interfacing DC Motor with 8051 Microcontroller with the help of both L293D and L298N. When we talk about controlling the robot, the first thing comes into the mind is controlling DC motors. Interfacing DC motor to the microcontroller is very […]
DC MOTOR INTERFACING WITH 8051 MICROCONTROLLER Read More »