The project is to use dsPIC33F controller with many embedded peripheral modules, and this family controller is applicable/perfect for muti-purpose controlling. This project is full construction of mini puppet theater with computer control. dsPIC controls lightings and motion of… Electronics Projects, PIC33FJ256MC510 robotic puppet controls “dspic projects, microchip projects, microcontroller projects,
The project is to use dsPIC33F controller with many embedded peripheral modules, and this family controller is applicable/perfect for muti-purpose controlling.
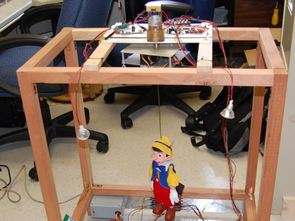
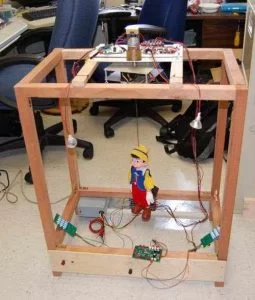
This project is full construction of mini puppet theater with computer control. dsPIC controls lightings and motion of Pinnocio charecter by controlling motors to pull strings that make the character alive. Microchip Part in the project: dsPIC33FJ256MC510: (qty 2) TC4427 MOSFET driver (qty 5) EEPROM 25LC256 (qty 1)
MPLAB v7.52 C30 Compiler v 3.01 This is the main function for the BLDC application. This code calls the setup routines, initializes system variables and parameters, enables interrupts, and then goes into a polling loop. The main polling loop clears the WDT and runs the medium (10msec) and slow (100msec) event handlers when appropriate. Authors: Nghia Tran, Victor Tran, Tammy Tran, Andy Tran and Mai Nguyen
FILE DOWNLOAD LINK LIST (in TXT format): LINKS-10476.zip
Source: PIC33FJ256MC510 ROBOTIC PUPPET CONTROLS
About The Author
Muhammad Bilal
I am a highly skilled and motivated individual with a Master's degree in Computer Science. I have extensive experience in technical writing and a deep understanding of SEO practices.