The ppDAQC board from Pi-Plates.com is an inexpensive yet powerful solution for expanding the input/output capabilities of the Spark Core. And since Pi-Plates are stackable, it is a simple task to scale up the I/O capabilities of a single Core. All that is required for connectivity are the four SPI signals (signals A2-A5) as well as a single digital output (D6). Power can come from the Core or from the ppDAQC board.
Step 1: Required Components
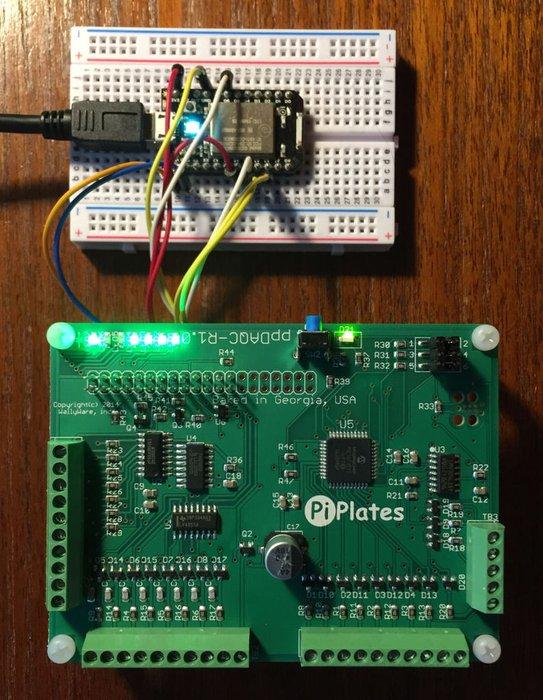
To build this assembly the following components are required:
1. A ppDAQC board from Pi-Plates.com
2. A Spark Core
3. A 5VDC power supply or the USB power supply included with the Core.
4. A small protoboard (currently included with the Core Evaluation kit)
5. Jumper wires
Step 2: Connections – 1
All Spark applications for the ppDAQC require three files:
1. ppDAQC.ccp – a lightweight set of library functions
2. ppDAQC.h – the header file with all of the function prototypes
3. yourapplication.ino – your application program
The application program has to have the following structure:
#include "ppDAQC.h"
extern int ppFRAME; //____ppDAQC I/O ports that are initialized below
extern int ppCE; //
void setup()
{
SPI.begin();
delay(1); // Wait 1msec
SPI.setClockDivider(SPI_CLOCK_DIV64);
delay(1); // Wait 1msec
SPI.setDataMode(SPI_MODE0); //All of these function are required for
//initializing the SPI/Pi-Plate interface
pinMode(ppFRAME,OUTPUT); //
pinMode(ppCE,OUTPUT); //
digitalWrite(ppCE,HIGH); //
//initialization for your application variables go below:
}
void loop()
{
// Your application code
}
About The Author
Ibrar Ayyub
I am an experienced technical writer holding a Master's degree in computer science from BZU Multan, Pakistan University. With a background spanning various industries, particularly in home automation and engineering, I have honed my skills in crafting clear and concise content. Proficient in leveraging infographics and diagrams, I strive to simplify complex concepts for readers. My strength lies in thorough research and presenting information in a structured and logical format.
Follow Us:LinkedinTwitter