LAWL-E: The Platform Stabilizer
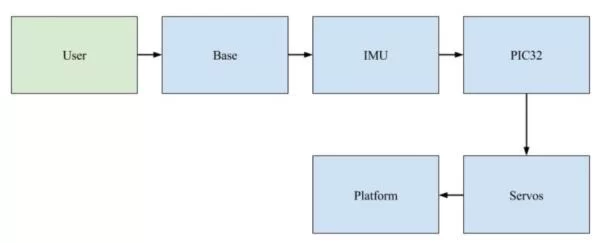
Introduction The purpose of this final project is to implement a microcontroller-based platform stabilizer. The major components of the platform stabilizer is an Inertial Measurement Unit (IMU) and two 180 degree rotation servos. The IMU uses a combination of a 3-axis accelerometer and a 3-axis gyroscope to provide measurements of the platform’s motion and angular […]
LAWL-E: The Platform Stabilizer Read More »