3-DOF Self-stabilizing Quadcopter Frame or: How We Learned To Stop Trying and Not Build the Drone
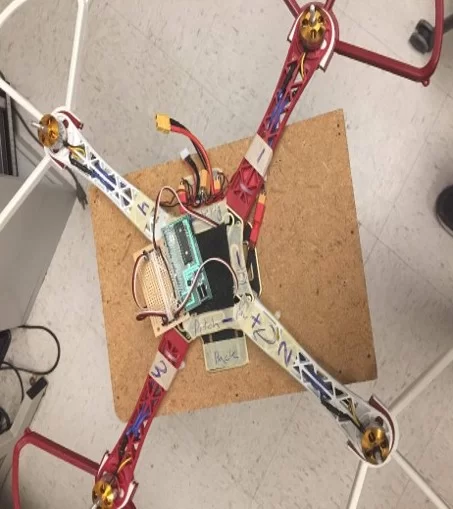
Introduction We created a 3 rotational degree of freedom quadcopter frame. The result was so that when placed on the small surface area of roughly a finger tip, the quadcopter can maintain its stability and recover from perturbations. The four motors increase and decrease in speed according the size and direction of the disturbance so […]