A friend asked me if I could build him a device that would allow him to take photos of his products in 360 degrees. That kind of photo is actually an animation that consists of several photos of the same product but from different angles. It means that we need a device that can be controllable and that could take pictures on even intervals.
UPDATE: English version of software is now available for download here.
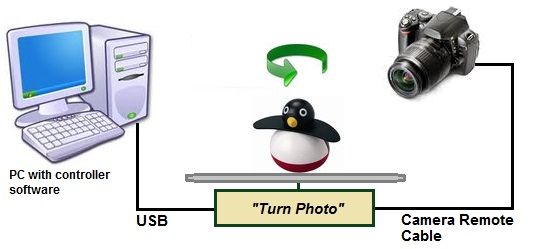
The idea:
As we can see from the picture above, a device called “Turn Photo” controls the digital camera (focus and shutter) and the device itself is controlled by a PC application written in Delphi 7.
All project files are available for download by clicking on the red download button below.
Turn Photo – hardware
Roughly, the device consists of PIC16F628A microcontroller, USB<->Serial PL2303 converter IC, ULN2803A IC transistor array, 2 opto-couplers and one stepper motor. Electronics are powered from USB port, actually from a PL2303 PCB Module, and motor is powered by independent 12V power source.
Two versions of this device were built. The first one was with stepper motor from an old 5.25″ floppy drive TEAC 14769070-90. That is a unipolar motor with 4 coils inside, and it has a resolution of 1.8 degrees per step which makes 200 steps in total per one complete revolution. When we drive it with half-stepping method, it doubles to 400 steps per revolution. A problem with this realization was that I didn’t use gears between the motor and the rotating plate (a circular plexiglass sheet that holds/rotates the product) – it was a direct-drive. A thing to note here is that we need to rotate objects with the smallest speed possible to avoid them dancing all over the plate. So, with a direct-drive and slow motor speed it produced massive vibrations. When motor speeds up – vibrations disappear, but we don’t want it speeding around. After testing and trying to fix the problem by changing stepper motor driver parameters and using dampers I decided to abandon this direct-drive design.
Second version of mechanics (the winning combination) is done by using a stepper motor M35ST-7P from an old HP scanner which was also unipolar with 4 coils but with a much smaller resolution of just 7.5 degrees per step. It means that the motor makes just 48 steps per one revolution. The good thing is that two gears came with this motor and the steps were prescaled by 25 (1:25 gear ratio) which means we now have 360/48/25 = 0.3 degrees per step. Another good thing here is that we can drive it faster because the speed also reduces by 25 x. This solves the vibrations problem totally and now we also have a maximum of 1200 steps or even 2400 with half-stepping per one revolution of final “drive” gear.
For more detail: Turntable Photography Equipment using PIC16F84A
About The Author
Ibrar Ayyub
I am an experienced technical writer holding a Master's degree in computer science from BZU Multan, Pakistan University. With a background spanning various industries, particularly in home automation and engineering, I have honed my skills in crafting clear and concise content. Proficient in leveraging infographics and diagrams, I strive to simplify complex concepts for readers. My strength lies in thorough research and presenting information in a structured and logical format.
Follow Us:LinkedinTwitter