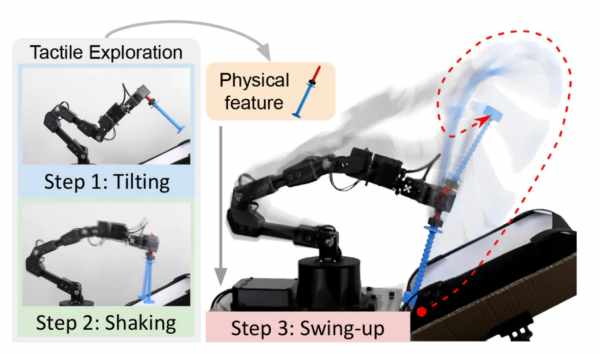
MIT CSAIL’S SWINGBOT LEARNS THE PHYSICAL PROPERTIES OF AN OBJECT TO SWING IT INTO NEARLY ANY DESIRED POSE
Being a human is far easier than being an artificial machine. The things we take for granted sometimes are some of the toughest tasks to give robots. Take, for instance, something as simple and mundane as handling objects of different sizes and weights. We as humans really do not care about how we are able […]