EMG Robotic Hand
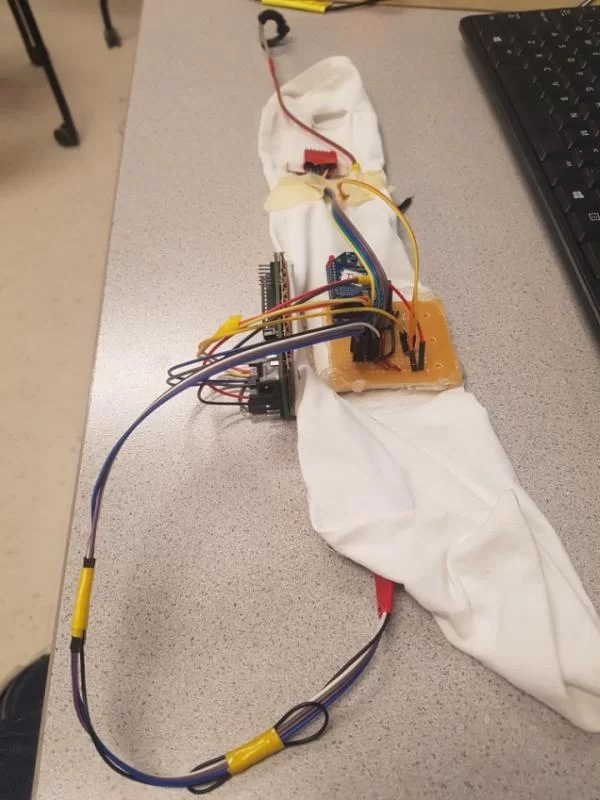
Introduction The goal of the project was to create a robotic hand that is controlled by sensing the muscular contractions in the arm of the user and to replicate the movements on the robotic hand. Electrodes will be placed on multiple areas on the arm of the user, and will sense the voltage differences of […]