Line following robot project, control of MC68HC908QB8 and PIC12F508 microcontrollers. Motor drive circuit used the L298. The system is complicated and cumbersome, but there’s a different robot projects useful sections PIC12F508-American SFH506-36 IR receiver… Electronics Projects, Line Following Robot Circuit PIC12F508 MC68HC908QB8 “microchip projects, microcontroller projects, “

Line following robot project, control of MC68HC908QB8 and PIC12F508 microcontrollers. Motor drive circuit used the L298. The system is complicated and cumbersome, but there’s a different robot projects useful sections PIC12F508-American SFH506-36 IR receiver solid (Infra Red Proximity Detector uses Sharp 38 or 40 kHz IRM) IRE5 sensor solid power supply regulated etc. is a good example of all the source codes also in MC68HC908QB8 and schematic, pcb drawings.
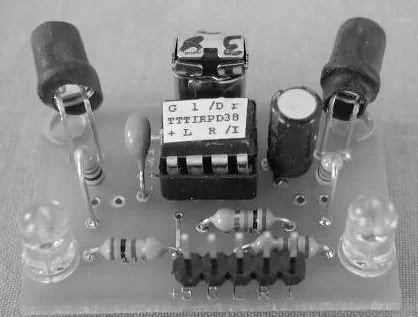
The TTT IRPD board utilizes a PIC12C508A to modulate two IR LED’s at 38 or 56.7KHz and look for reflections on an IR detector module. Using the TTT IRPD with another controller is simplicity itself, you can even use it on a BEAM robot because no computational power is required at all from the host computer. The IRPD requires +5V and less than 5ma total current on average, so its not very power hungry either.
This version is small and simpler to build than previous versions. There are five pins to connect the IRPD to your host controller, +5V, Ground, Left detect output, Right detect output and Enable are the connections used. The Enable pin does not need connecting unless you wish to disable the IRPD to avoid detection by passive IR sensors. The “I” pin is the Enable, its also known as the Inhibit pin, and if you pull this pin low the IRPD stops broadcasting IR and stops looking for reflections. If this pin is left high then whenever a signal is detected when the Left IR LED is flashing the L pin will go high. The same occurs when the Right IR LED is being flashed. An object straight ahead will turn both outputs on.
Source: LINE FOLLOWING ROBOT CIRCUIT PIC12F508 MC68HC908QB8 alternative link: line-following-robot-circuit-pic12f508-mc68hc908qb8.rar alternative link2 alternative link3
About The Author
Ibrar Ayyub
I am an experienced technical writer holding a Master's degree in computer science from BZU Multan, Pakistan University. With a background spanning various industries, particularly in home automation and engineering, I have honed my skills in crafting clear and concise content. Proficient in leveraging infographics and diagrams, I strive to simplify complex concepts for readers. My strength lies in thorough research and presenting information in a structured and logical format.
Follow Us:LinkedinTwitter