A Line Follower Robot is a simple yet fascinating robot for most students/hobbyists to build. In this tutorial we will learn How a Line Follower Robot Works and how we can build one using the PIC Microcontroller PIC16F877A. PIC16F877A is a 40-pin Multipurpose MCU from Microchip, we have used this IC in our complete PIC tutorial series. If you are new, here you might want to a look at these PIC tutorials to learn the basic of this IC and how to upload programs to the microcontroller. Since we have already covered this information in our tutorials we will skip them in the explanation below.
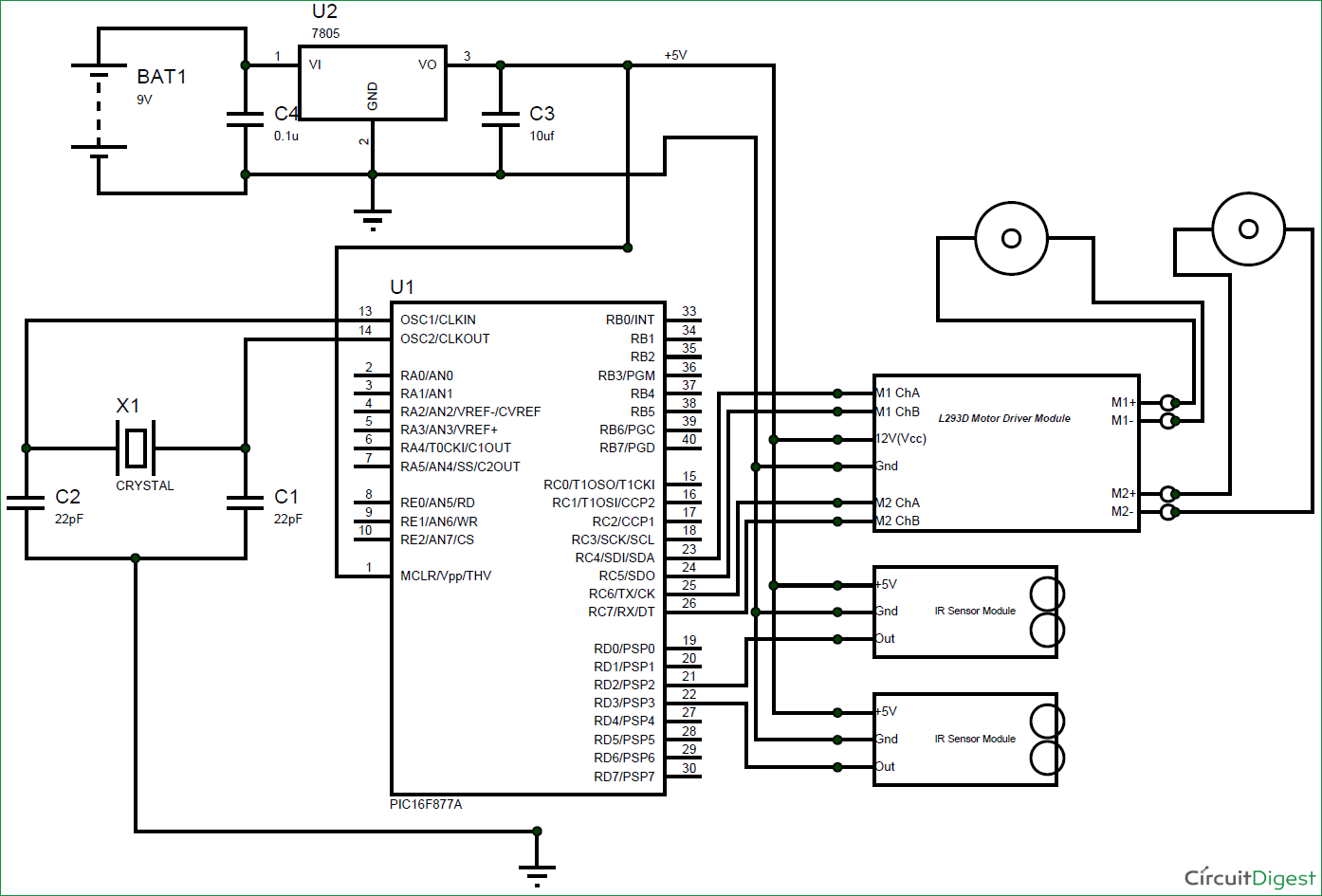
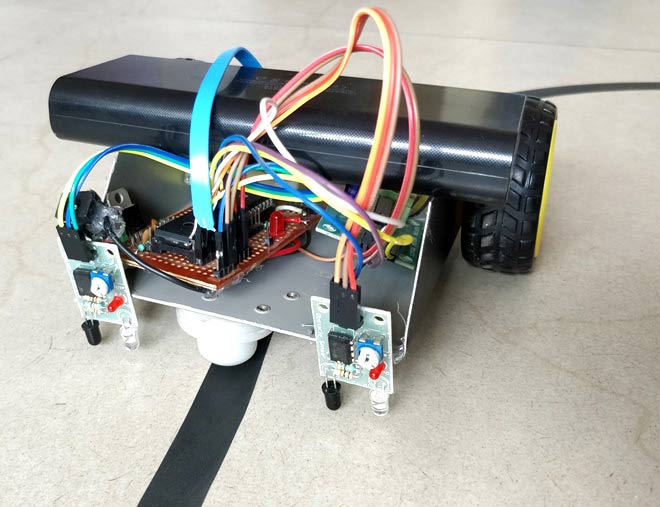
The circuit employs two IR sensors and a pair of DC gear motors along with a motor driver module as shown above. The Motor driver module used in this project is L293D, we will need a motor driver because the output pin of the PIC Microcontroller cannot source enough current for the motors to drive. This module will be powered directly from the power source (5V) as shown in the circuit. The module has four pins (two for each motor) which are connected to the PIC to control the direction of the motors. We also have two IR sensors which act as an input to the PIC microcontroller. These sensors will go high (1) if they are over a white surface and will go low(0) when over a black surface.
for more detail:Line Follower Robot using PIC Microcontroller
About The Author
Ibrar Ayyub
I am an experienced technical writer holding a Master's degree in computer science from BZU Multan, Pakistan University. With a background spanning various industries, particularly in home automation and engineering, I have honed my skills in crafting clear and concise content. Proficient in leveraging infographics and diagrams, I strive to simplify complex concepts for readers. My strength lies in thorough research and presenting information in a structured and logical format.
Follow Us:LinkedinTwitter