

A line following robot is a versatile machine utilized to detect and take after
the dark lines that are drawn on the white surface. As this robot is produced utilizing a breadboard, it will be exceptionally easy to build. This system can be fused into the Automated Guided Vehicles (AGV) for giving the simple method for activity. By and large, the AGV is incorporated with the chip and PCs for control- ling its framework. It likewise utilizes a position input framework for going in the desired way. Furthermore, the electric signs also, RF correspondence are required for speaking with the vehicle and framework controller. Such cumbersome capacities are totally not required in this line following robot, and it just uses the IR sensors to movement on the dark lines. Dissimilar to room-investigation robots that regularly stall out against seats and cover edges, you don’t need to pursue a very much planned line-following robot. Most line-following robots have two engines, two front sensors, and a fundamental electronic circuit for self-ruling control. However, an awesome thing about this kind of robot is that it simple to roll out little improvements for included many-sided quality. Straightforward change is to introduce the robot in an ornamental holder, alongside beautiful LEDs. Further developed outlines include dierent sensors and a programmable microcontroller Tiva for quicker speed, smoother turning.
Step 1: Hardware Components
1. Microcontroller TM4C123GH6PM
The Cortex-M microcontroller selected for hardware-based programming and interfacing illustrations is TM4C123 from Texas Instruments. This microcontroller belongs to the high-performance ARM Cortex-M4F based architecture and has a broad set of peripherals integrated.
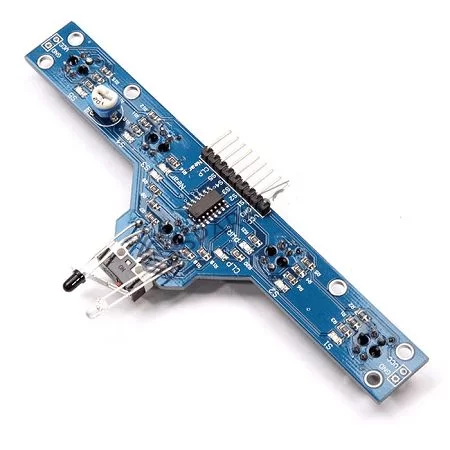
2. 5 IR Sensor and Obstacle
This is a Five IR Sensor Exhibit with Obstacle and Knock Sensor. A 5 IR sensor use with TCRT5000 have a conservative development where the producing light source and the locator are masterminded a similar way to detect the nearness of a question by utilizing the intelligent IR-beam from the object.The working wavelength is 5 cm. The identier comprises of a phototransistor. Refer gure ?? Input voltage: 5V DC VCC, GND Pins. Output: 5 from TCRT5000 is S1, S2, S3, S4, S5 digital. Output: 1 from Bump switch is CLP digital. Output: 1 from IR Obstacle sensor Near digital.
3. DC Motors
A motor is an electrical machine which converts electrical energy into me- chanical energy.
4. H-Bridge L298N
Utilizing L298N as the control chip,the module has such qualities as solid driving ability,low caloric esteem and solid hostile to impedance capacity. This module can utilize worked in 78M05 for electric work by means of a driving force supply part. Be that as it may, to stay away from the harm of the voltage balancing out chip, please utilize an outer 5V rationale supply when utilizing in excess of 12V driving voltage. Utilizing vast limit channel capacitor, this module can take after current to secure diodes,and enhance the unwavering quality. L298N Double H Bridge Motor Driver Module:Refer gure ?? Control chip: L298N Logical voltage: 5V Drive voltage: 5V – 35V Logical current: 0mA – 36mA Drive current: 2A(MAX single bridge) Storage temperature: -20C to +135C Max power: 25W Size: 43 x 43 x 27mm
5. Power Bank
a power bank is a compact charger or power supply which can charge by any USB upheld gadgets (unless indicated contrastingly by maker). Most Power banks are for advanced cells, cameras or potentially tablets like Ipads. The power bank is produced using ultra high-thickness A+ Li-polymer battery cells and premium microchips. It has LED light battery markers and wise circuit board.
Source: Line follower robot using microcontroller
About The Author
Ibrar Ayyub
I am an experienced technical writer holding a Master's degree in computer science from BZU Multan, Pakistan University. With a background spanning various industries, particularly in home automation and engineering, I have honed my skills in crafting clear and concise content. Proficient in leveraging infographics and diagrams, I strive to simplify complex concepts for readers. My strength lies in thorough research and presenting information in a structured and logical format.
Follow Us:LinkedinTwitter