
This project controls two servo motors – both clockwise and anticlockwise and has variable speed.
You can use the Joy Stick to “pan and tilt” a remote camera or provide “left-right-up-down” action for a crane or an animation on your model layout. The project also tests servo motors.
The CIRCUIT
The circuit is fairly simple.
The input from the Joy Stick has been separated into two sections to make detection easy and this requires 2 inputs.
A pot is connected to another input line and 2 more lines are required for the servos. Pin 8 is connected to 0v and pin 1 is connected to the supply. The only unused pin is GP3 (Input ONLY),
Most of the work is done by the micro. It uses a technique of charging a capacitor via a resistor and determining how long it takes to charge, to work out which switch is pressed or the position of the pot.
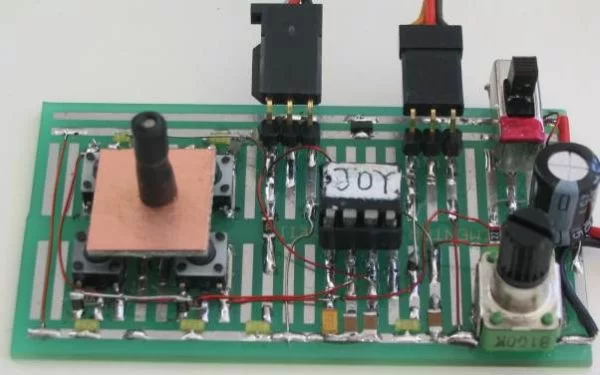
It then outputs a 1mS or 2mS pulse to one of the servo motors to create clockwise or anticlockwise rotation of the output shaft and the speed of rotation can be set by adjusting the pot. The two LEDs on the output pins let you see the pulses being delivered to the servo’s when the project is used to test these devices. The photo’s below show the circuit built on prototype board:
THE JOY STICK
There are 7 different (actually more) combinations of positions for the joy stick and we need to decode them and work out what to do with the result.
This is too many resistance-values for a single input and so we have used two inputs with 3 resistance-values for each plus the possibility of all switches being pushed at the same time.
The resistance values we have used are 22k and 47k. When 2 switches are pressed, the resistors are in parallel to produce 15k, but only 22k and 47k is detected in this program.
The program creates a loop that detects up to 19k, to produce an output of loop=1, then up to 38k for a value of loop=2 and higher than 38k for a value of loop=3. But if the program keeps looping for 10 loops, it determines that no button is pressed and creates a value of 4. The change-points are mid-way between the resistance-values we have used and thus any tolerances on the capacitors and resistors can be accommodated.
This means a resistance of 15k produces a value of 1, 22k produces a value of 2 and 47k produces a value of 3. This is most important as we don’t want the cut-off points to be on the border as the program may produce an output of 1 instead of 2. The project is fairly voltage sensitive and if the right-hand buttons are not detected, the battery voltage is low.
THE SERVO
A servo module consists of a motor and gearbox, with a PC board containing the electronics to drive the motor in clockwise and anticlockwise direction. The electronics also detects the width of the incoming pulse to drive the motor to mid-position and also other positions, but this feature is not used in this project.
The motor is connected to the positive rail of the supply via a bridge of transistors within the servo and the red and black wires from the module are taken to the positive and negative of a battery to provide the current to drive the motor.
The third lead (white) is the control line and this is taken to the micro.
This line needs a pulse and the maximum repetition-rate accepted by the servo is every 18mS – it will accept a longer timing between pulses. This is the timing between pulses, the actual pulse-width is very short, between 0.9mS and 2.2mS.
If the pulse is less than 1mS duration (wide) the servo will travel fully in the anticlockwise direction.
If the pulse is 2mS, the servo will travel in the clockwise direction.
If the pulse is 1.5mS, the servo will travel to the mid position.
If the time between pulses is longer than 18mS, the speed of rotation is decreased.
This is what we have done. We have provided a 1mS or 2mS pulse and created a long time-interval between pulses to produce a reduced rate of movement.
For more detail: Joy Stick Controller using PIC12F629
About The Author
Ibrar Ayyub
I am an experienced technical writer holding a Master's degree in computer science from BZU Multan, Pakistan University. With a background spanning various industries, particularly in home automation and engineering, I have honed my skills in crafting clear and concise content. Proficient in leveraging infographics and diagrams, I strive to simplify complex concepts for readers. My strength lies in thorough research and presenting information in a structured and logical format.
Follow Us:LinkedinTwitter