A Stepper Motor is a brushless, synchronous DC motor which divides a full rotation into a number of steps. For detailed information on working, types and stepping modes, refer the article on Stepper Motors. Here the operation of a unipolar Stepper motor with PIC18F4550 microcontroller has been explained.
As stated earlier, a Stepper motor rotates step by step. Each stepper motor has a defined step angle which is the minimum degree of rotation in a single step. This step angle depends on the internal construction of the motor. If a stepper motor has a step angle of 1.8°, then it would need 200 steps for a complete circular rotation. For control operation, construction and stepping modes, refer the article on Stepper Motors.
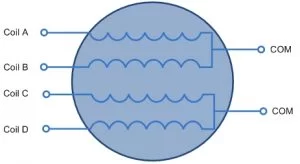
The stepper motor consists of a Rotor and four Stators. The stators are rounded with center-taped winding. The center-taped terminals are known Common terminals. Thus a unipolar stepper motor consists of total 6 wire-ends (four wires for coils and two for the common ends).
The COMs are connected with +12V which is the power supply to drive the stepper motor. To rotate the Rotor, zero voltage is provided at coil-ends one by one in a sequential manner. (Based on this sequence, stepper motors have different stepping modes which are explained in the article on Stepper Motor)
The sequential voltage signals are provided by the PIC microcontroller. A repetitive sequence of 1110, 1101, 1011 and 0111 is sent by PIC18F4550 to its PortB pins to rotate the Stepper motor.
Although this PIC microcontroller can provide enough output current to drive the stepper motor, but its becomes more efficient by employing a current driver between the controller and motor. For this purpose, sometimes ULN2003 is used to drive the stepper motor. Check interfacing Stepper motor with 8051 using ULN2003 for reference.
Project Source Code
###
// Program to Interface Stepper Motor with PIC18F4550 Microcontroller void main() { unsigned int i=0; TRISB=0; // Set PortB as output port while(1) { LATB=0x07; // To send 1110 at PortB Delay_ms(20);
LATB=0x0B; // To send 1101 at PortB Delay_ms(20);
LATB=0x0D; // To send 1011 at PortB Delay_ms(20);
LATB=0x0E; // To send 0111 at PortB Delay_ms(20); } }
I am a highly skilled and motivated individual with a Master's degree in Computer Science. I have extensive experience in technical writing and a deep understanding of SEO practices.
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt-out if you wish. ACCEPTCheck Privacy Policy
Manage consent
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.