
In our first program , we will simply sweep the servomotor from CCW to CW and then sweep back. The program will be kept simple as to demonstrate the priniciples of controlling a servo with a the PIC Basic language. The schematic can be seen in figure 2 (below).
The variable pw controls the pulsewidth, and is started at 100 (extreme left, -45 degrees). The program sends the pulse out to the servo, and then is increased by a value of 1 until it reaches 200 (extreme right, 45 degrees), at which point it will reverese the rotation.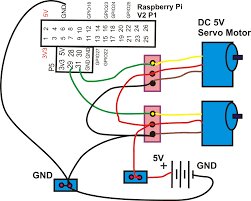
Listing 1
‘ First servomotor program
‘ Sweeps left to right, then reverses
Symbol B1 = pw
pw = 100
sweep: pulsout 0,pw
pause 18
pw = pw + 1
if pw > 200 then back
goto sweep
back: pulsout 0,pw
pause 18
pw = pw – 1
if pw < 100 then sweep
goto back
‘ create a variable pw
‘ start at extreme left
‘ send pulse to motor
‘ set frequency to about 50 Hz
‘ increase pw by 1
‘ at extreme right, turn CCW
‘ otherwise, continue
‘ send pulse to motor
‘ set frequency to about 50 Hz
‘ decrease pw by 1
‘ at extreme left, turn CW
‘ otherwise, continue
End of Listing 1
If desired, we could extend the rotation of the servomotor to a full 180 degrees (-90 to 90 degrees) rotation by decreasing the minimum pulsewidth to below 1 ms and increasing the maximum pulsewidth to over 2 ms. This can be accomplished with our previous program by modifying the occurances of 100 and 200 to your desired minimum and maximum pulsewidths, respectivly.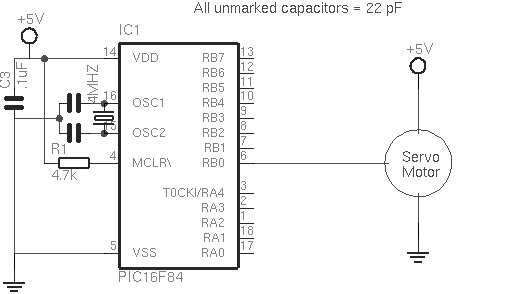
However, a note of caution: the pulsewidth required for servos varies from brand to brand. One motor may require a 2.8 ms pulsewidth for maximum rotation, while another may only need 2.4 ms.
Furthermore, servomotors have end stops that limit its rotation. If you send the motor a pulsewidth that is beyond the end stops, the motor will keep trying to turn. A motor in this stalled condition not only draws more current, but also puts wear on the internal gears, shortening the lifespan of the motor.
For more detail: First Servomotor Control Program
About The Author
Ibrar Ayyub
I am an experienced technical writer holding a Master's degree in computer science from BZU Multan, Pakistan University. With a background spanning various industries, particularly in home automation and engineering, I have honed my skills in crafting clear and concise content. Proficient in leveraging infographics and diagrams, I strive to simplify complex concepts for readers. My strength lies in thorough research and presenting information in a structured and logical format.
Follow Us:LinkedinTwitter