In this tutorial, I will show you how to write a very simple program. I am assuming that you have written ladder logic before, and that you have some basic familiarity with microcontrollers, but that you have never used LDmicro. If you don’t know very much about ladder logic or PLCs, then the plcs.net tutorial might be helpful to you.
Our device will have one pushbutton, and one LED. At startup, the LED will be off. When you press the pushbutton once, the LED will turn steady on. The second time you press the pushbutton, the LED will start blinking. The third time that you press the button, the LED will turn off again. On subsequent presses, the cycle will repeat.
Microcontroller Selection and Schematic
We will be using a PIC16F876, which is easily available from Digikey or other online distributors. It comes in a number of different packages; I chose a DIP.
Note that as of Nov 2009, the PIC16F876 is no longer recommended for new design. This means that it will probably get discontinued at some point in the next few years. You may prefer to instead use a PIC16F886, which is pin-compatible. If you do, then make sure to specify the correct part when you compile, since the ‘F886 is not code-compatible.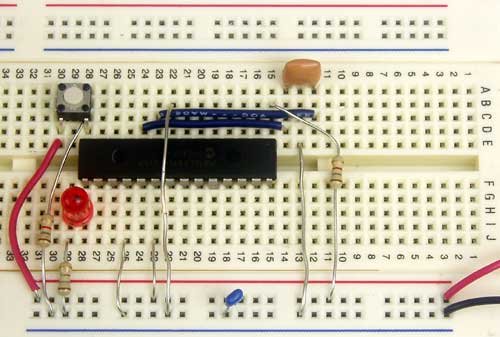
This is our schematic:
The microcontroller (IC1) is part number PIC16F876-20I/SP-ND at Digikey. Almost any three-terminal resonator (U1) will do; you might try a 535-9356-ND or an X909-ND.
The only thing that might confuse you is that the pushbutton goes to Vdd, and there is a pull-down. You might be more used to seeing a pushbutton to ground with a pull-up. For TTL, this mattered. For modern CMOS it does not, and I find this `active HIGH’ arrangement less confusing than the traditional `active LOW’ circuit.
Also, I chose to use a ceramic resonator with internal capacitors, U1, instead of a crystal and two ~20 pF caps. A crystal would work just as well and it would be more accurate, but it would be a little bit more expensive, and you would need more parts.
You could build this circuit in many different ways. I built it on a solderless breadboard, and it ended up looking like this:
(The resistor values pictured are not quite the same as the schematic; none of them are critical.)
Ladder Diagram for the Program
First, we are going to need an oscillator to generate the `blinking’ signal for the LED. There is a standard way to do this in ladder logic:
This will flash at 1/((250+250) ms), or 2 Hz, or twice per second. The duty cycle will be 50%—250 ms on, then 250 ms off. This circuit can make any kind of oscillator, with whatever period or duty cycle you require, so it is a good one to remember.
Also notice that we have chosen to use an internal relay (`Rfoo’) instead of one attached to an I/O pin (`Yfoo’ or `Xfoo’). This makes sense, because there is no particular reason to bring that signal out to a pin. LDmicro will automatically assign memory for the internal relay.
Our program will have three states: off, steady on, and blinking. The program should change its state on each rising edge of the signal from the pushbutton. This is a good application for a circular counter. We will say that `state 0′ is `off,’ `state 1′ is `steady on,’ and `state 2′ is `blinking.’ The counter counts 0, 1, 2, 0, 1, 2, …, so if we just let the rung-in condition of the counter be the pushbutton input, then everything will work like we want:
Now the only thing left is to use the program state to set the state of the LED. We can do it like this:
It should be easy to convince yourself that this does what we want. If the program is in state 1, then the `Cstate == 1′ instruction energizes `Yled’, as desired. In state 2, the `Cstate == 2′ instruction energizes `Yled’, but only when `Rosc’ is also true. Since `Rosc’ is oscillating, that means that the LED will blink, as desired. Finally, in state 0, neither of the equals instructions will be true, so there is no way that `Yled’ could ever turn on.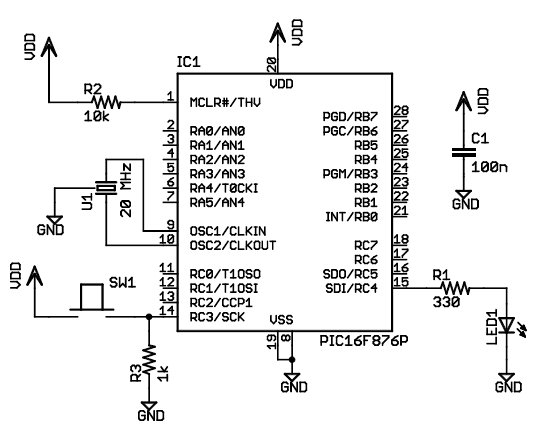
Entering the Ladder Diagram
Now that we have our circuit, we can draw it in LDmicro. When you start LDmicro, you will see a single empty rung:
We want to enter the first rung from the listing above. We will start with the coil, so choose Instruction -> Insert Coil. This will create a coil named `Ynew.’ This is what we want, except that the name is wrong, and it should be negated. Double-click the coil; this will bring up a dialog where we can fill that in:
Now we can insert the rest of that rung in the same way. Click on the left edge of the coil, so that the cursor is vertical, and to the left of the coil. Now choose Instruction -> Insert TON (Delayed Turn On). Once again double-click the timer to rename it and set the period. Add the TOF timer and the contacts in the same way.
Now we want to enter the second rung, so choose Edit -> Insert Rung After. Then click on the second rung to move the cursor there:
For more detatl: An LDmicro Tutorial
About The Author
Ibrar Ayyub
I am an experienced technical writer holding a Master's degree in computer science from BZU Multan, Pakistan University. With a background spanning various industries, particularly in home automation and engineering, I have honed my skills in crafting clear and concise content. Proficient in leveraging infographics and diagrams, I strive to simplify complex concepts for readers. My strength lies in thorough research and presenting information in a structured and logical format.
Follow Us:LinkedinTwitter